







3rd year of primary school
I learned how to solder as well as eectronics basics.
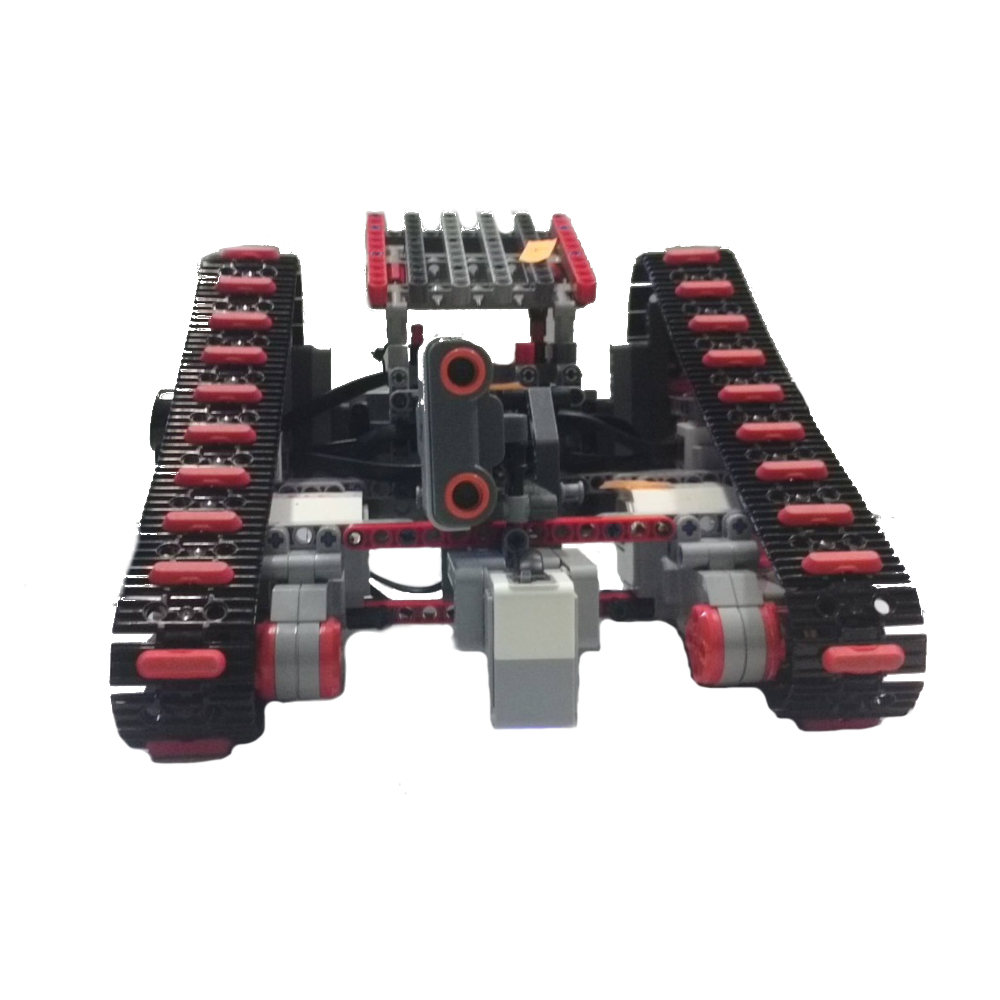
1st year of grammar school
I am programming robots using lego NXT a EV3.
3rd year of grammar school
I am starting to learn Python.
3rd year of grammar school
Lego is not enaugh for me! I am starting to learn python on Raspberry pi.
4th year of grammar school
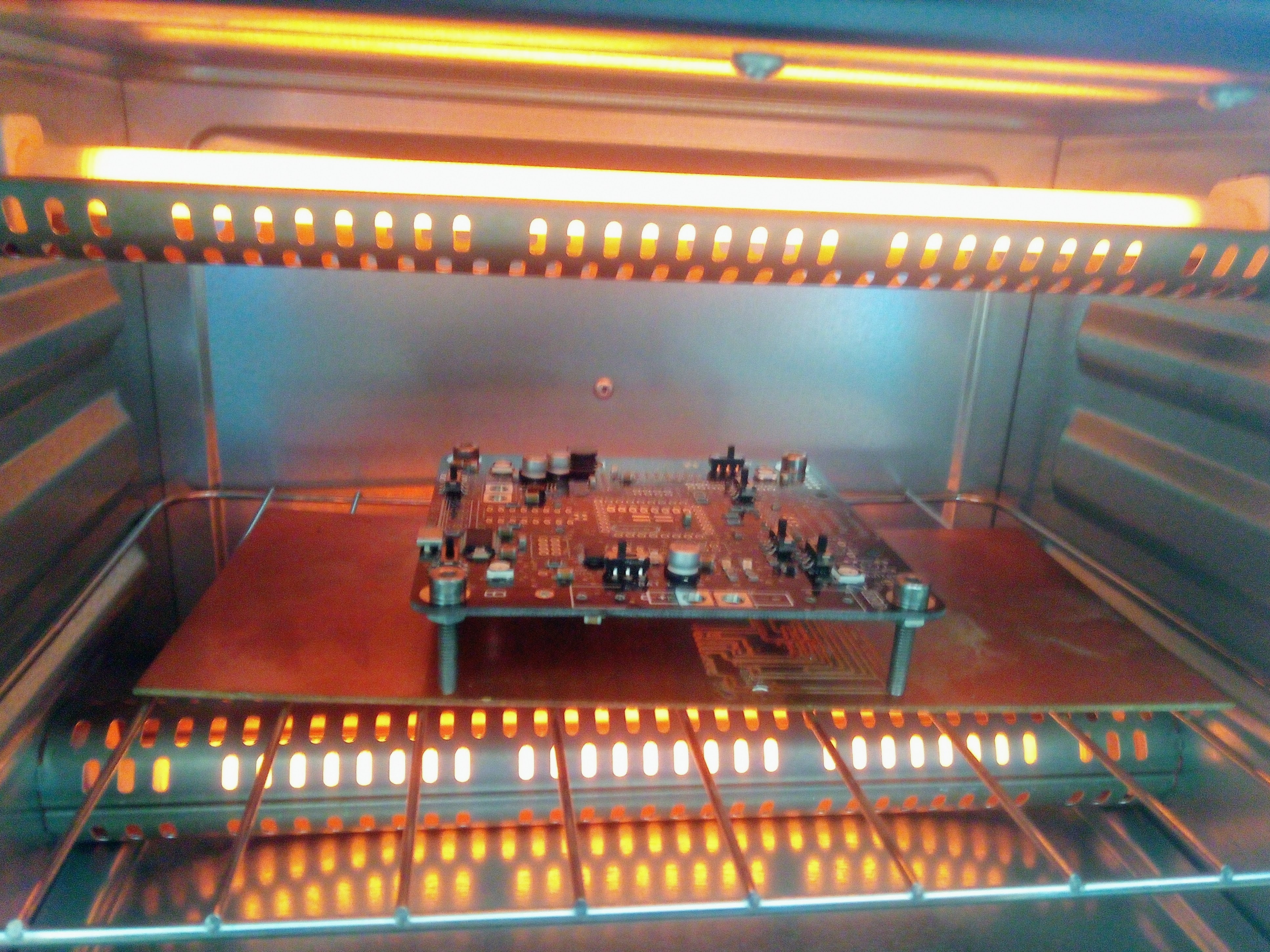
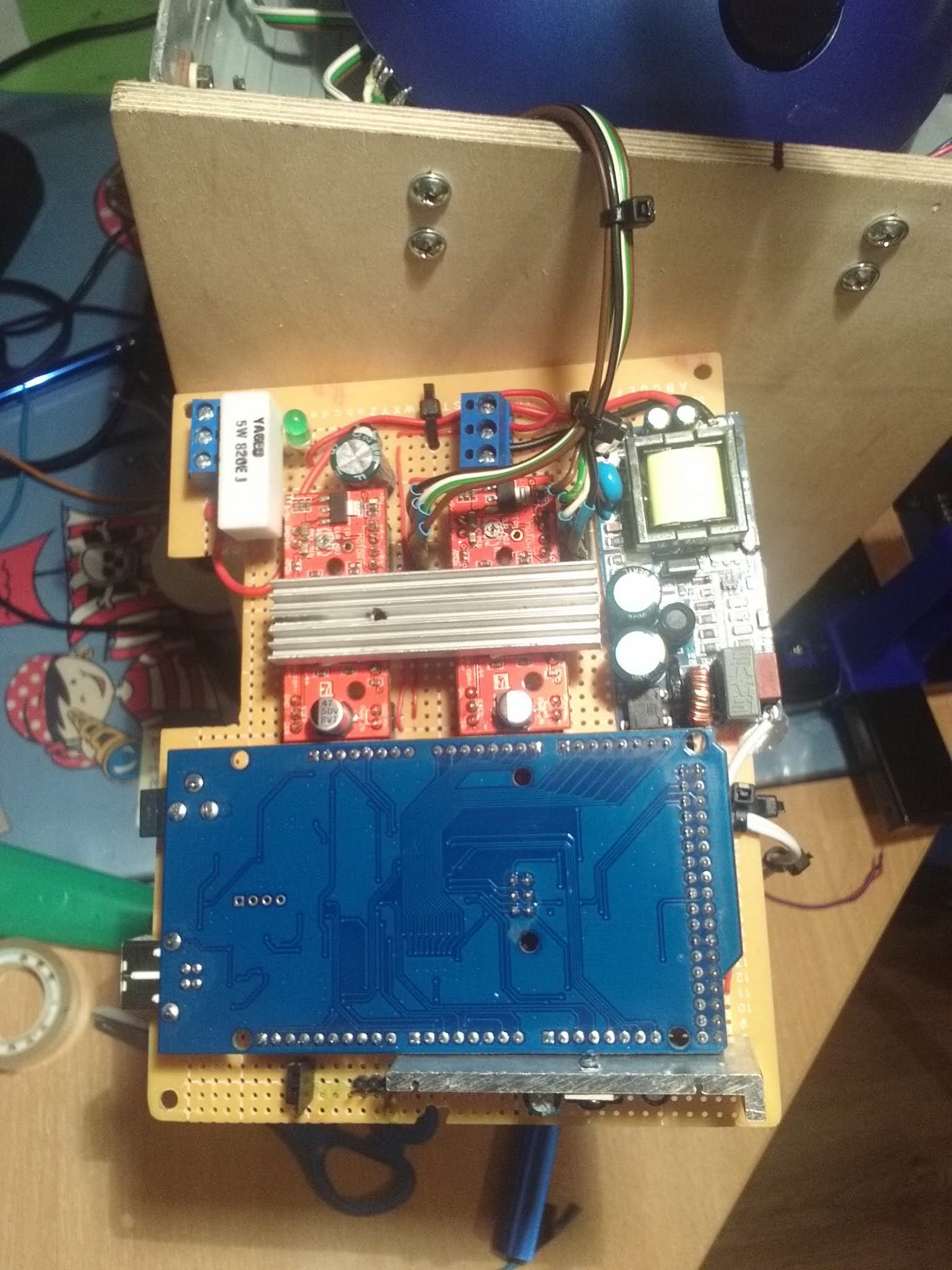
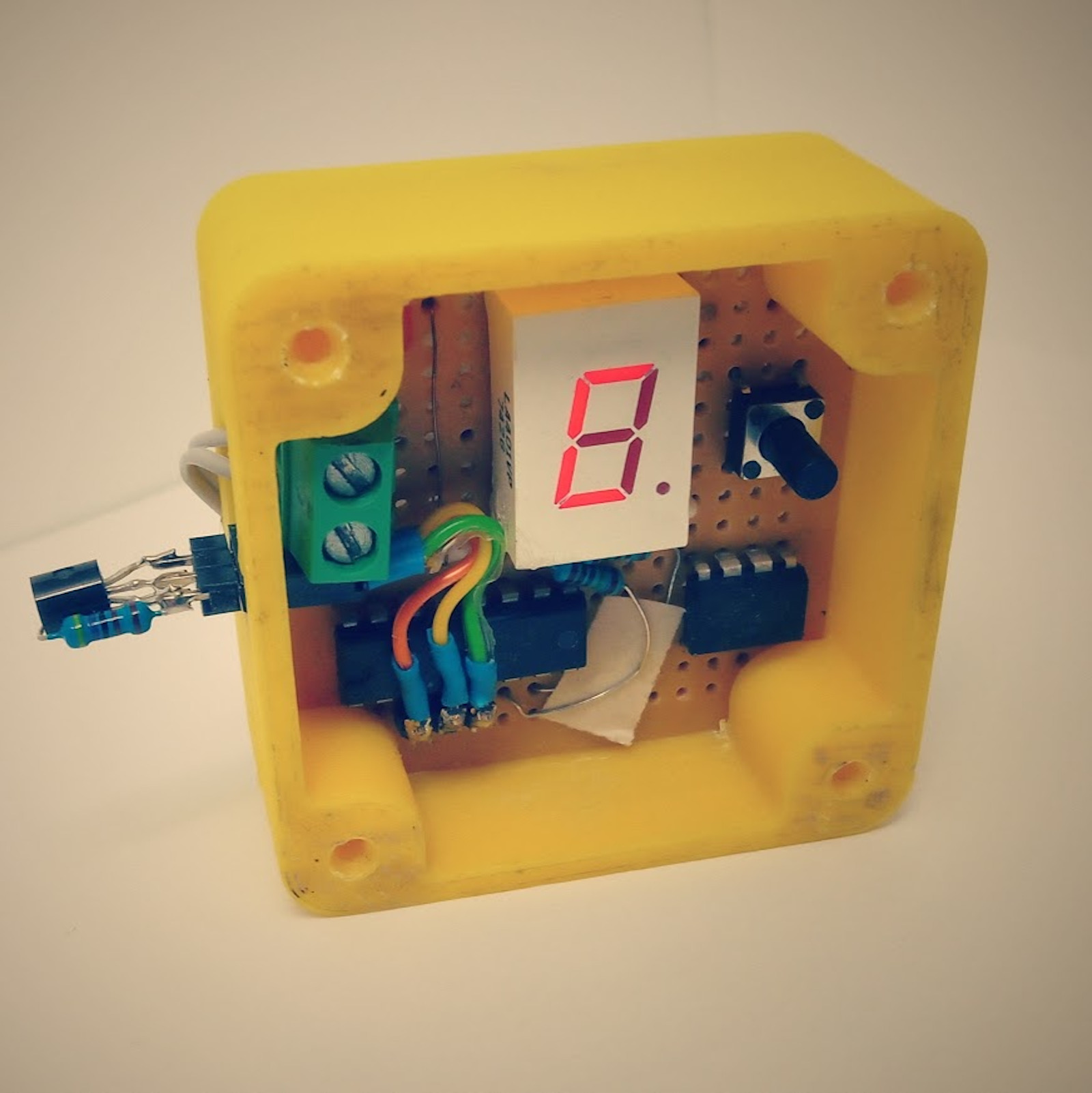
I am starting to program Arduino. I am also creating my first electronics projects.
1st year of high school
I am participating on IOT course at "Žilina univerzity", where I discover AVR programming.
2nd year of high school
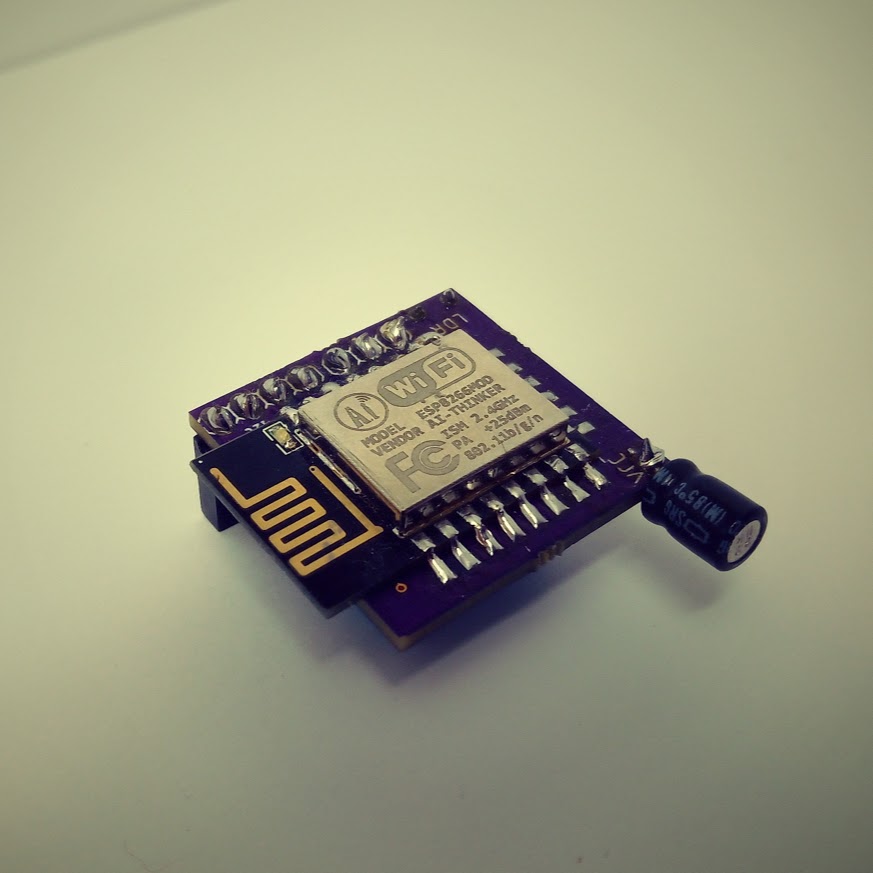
I am improving in programming AVR, HTML, CSS and I started to create IOT project using ESP8266
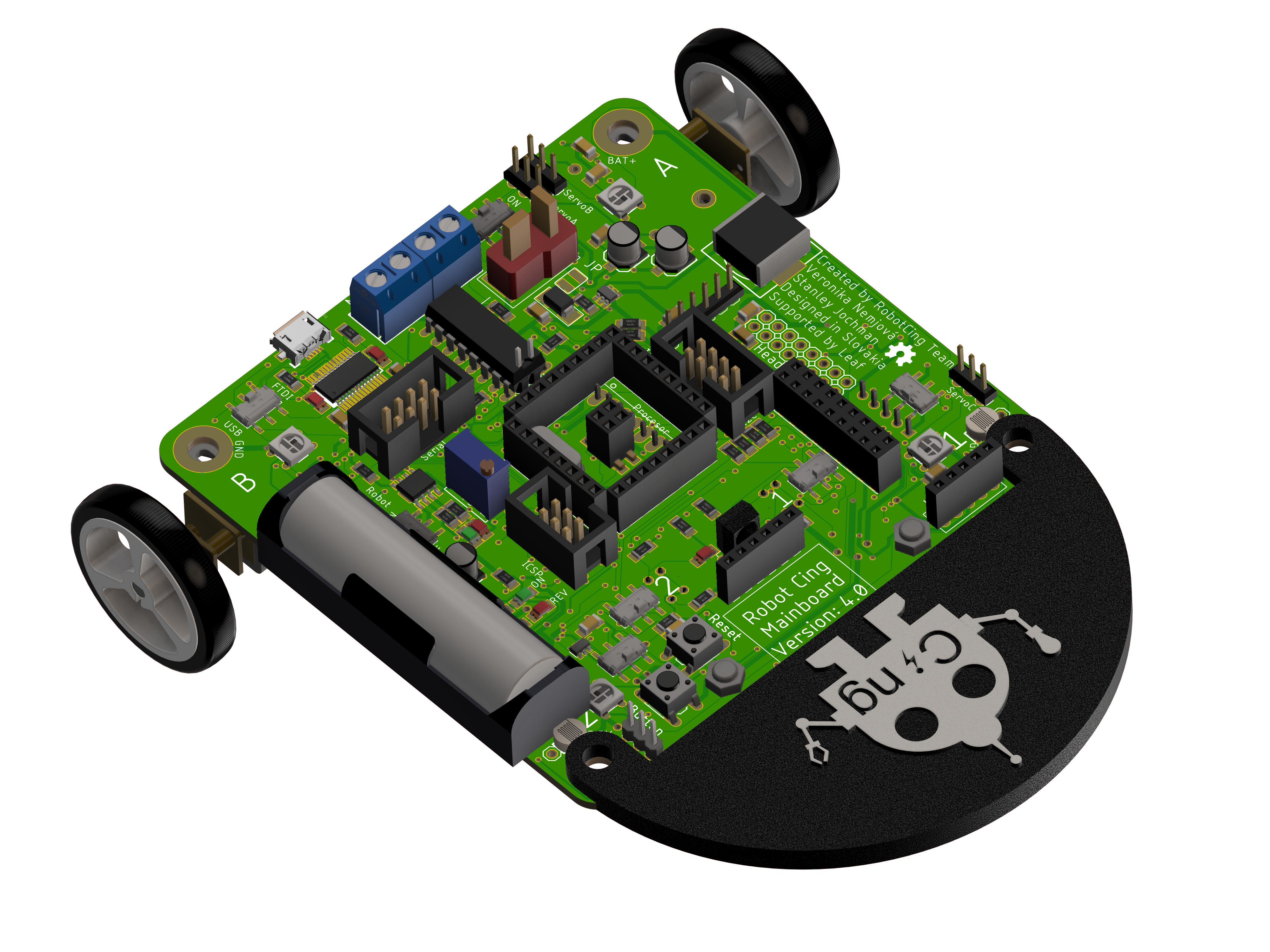
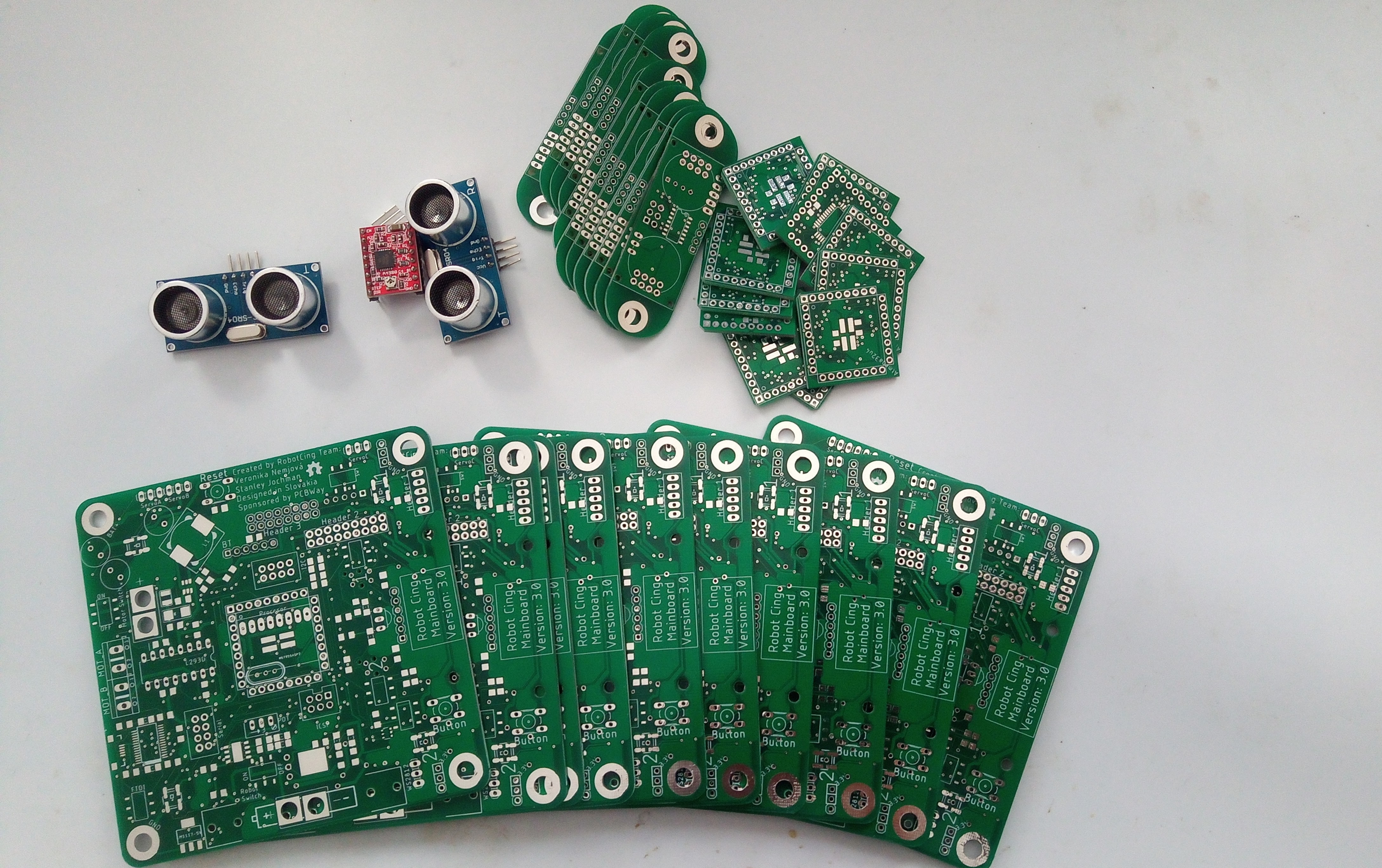
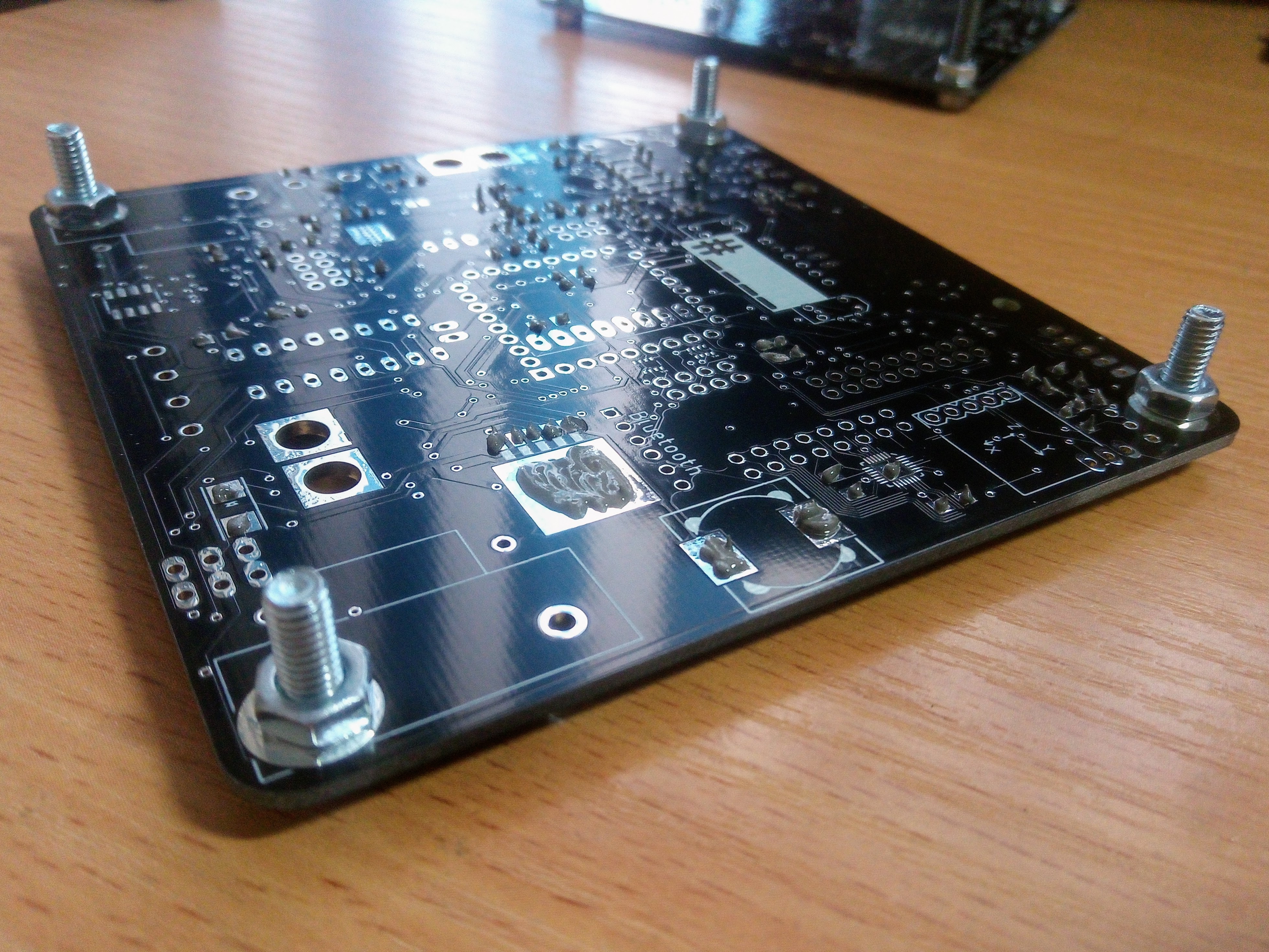
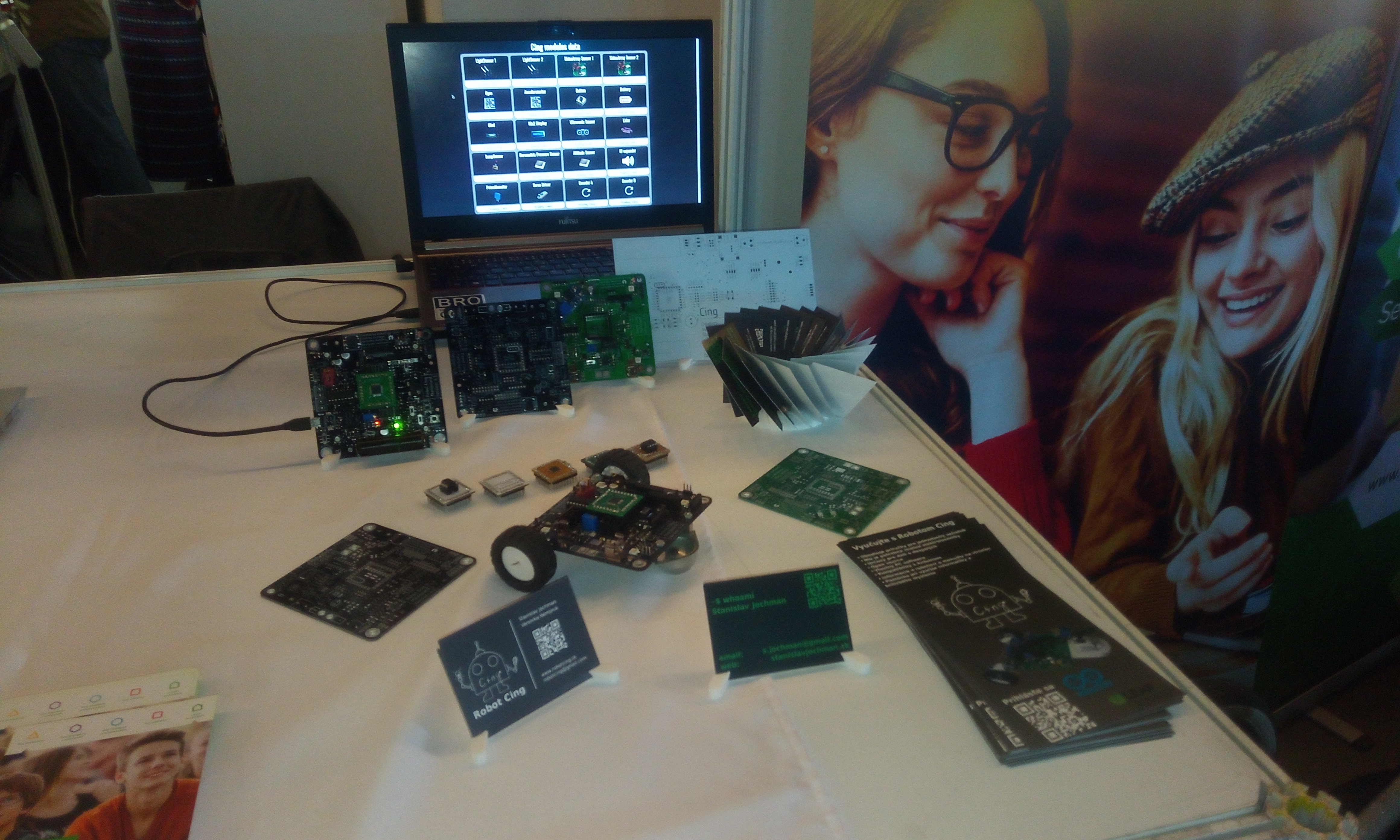
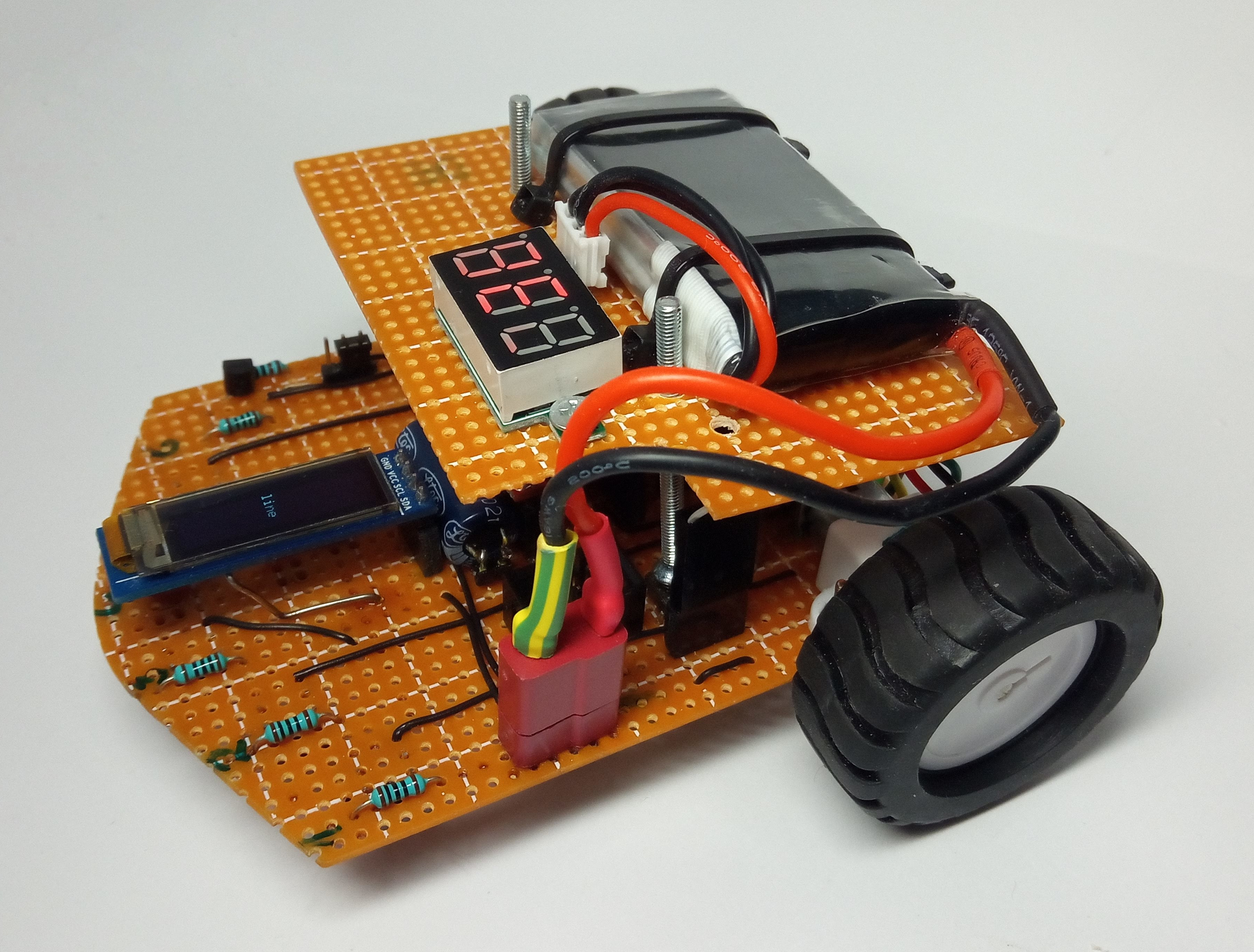
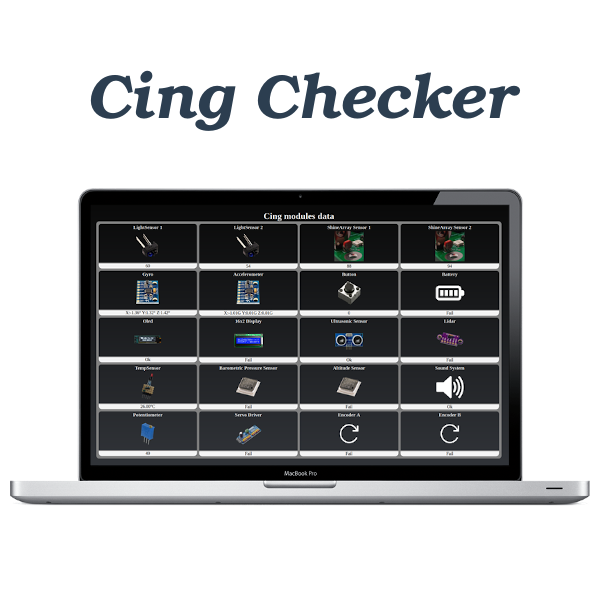
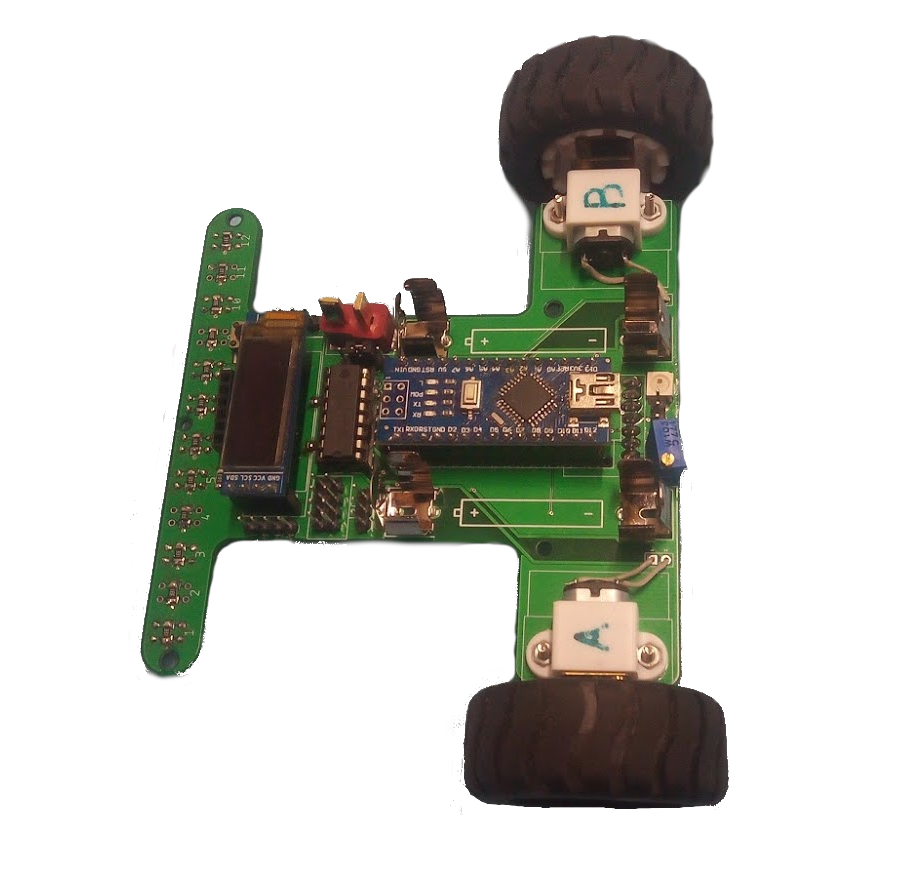
Cing
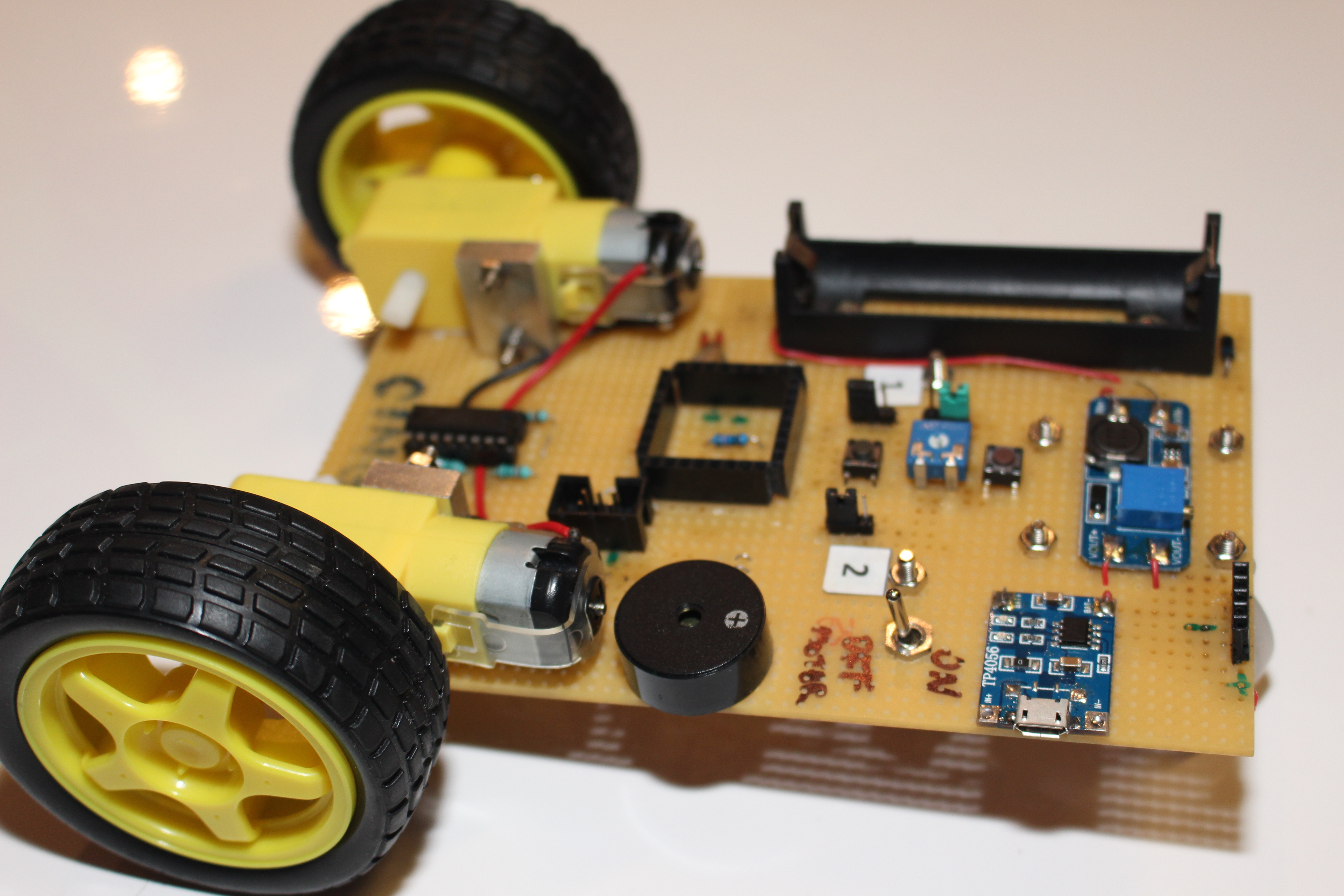
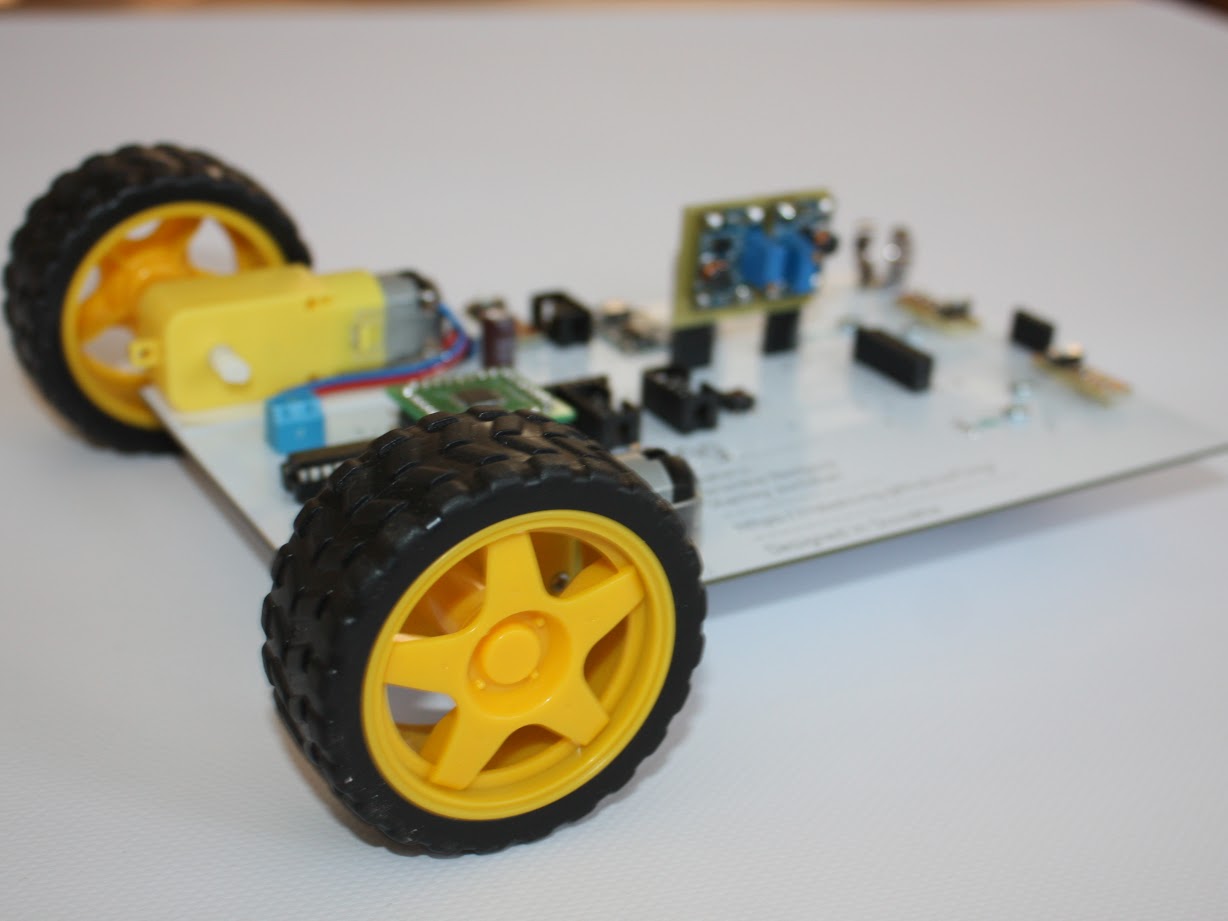
With my friend s Veronika Nemjova we started to create robot Cing, which is an educational robot for learning electronisc and programming.
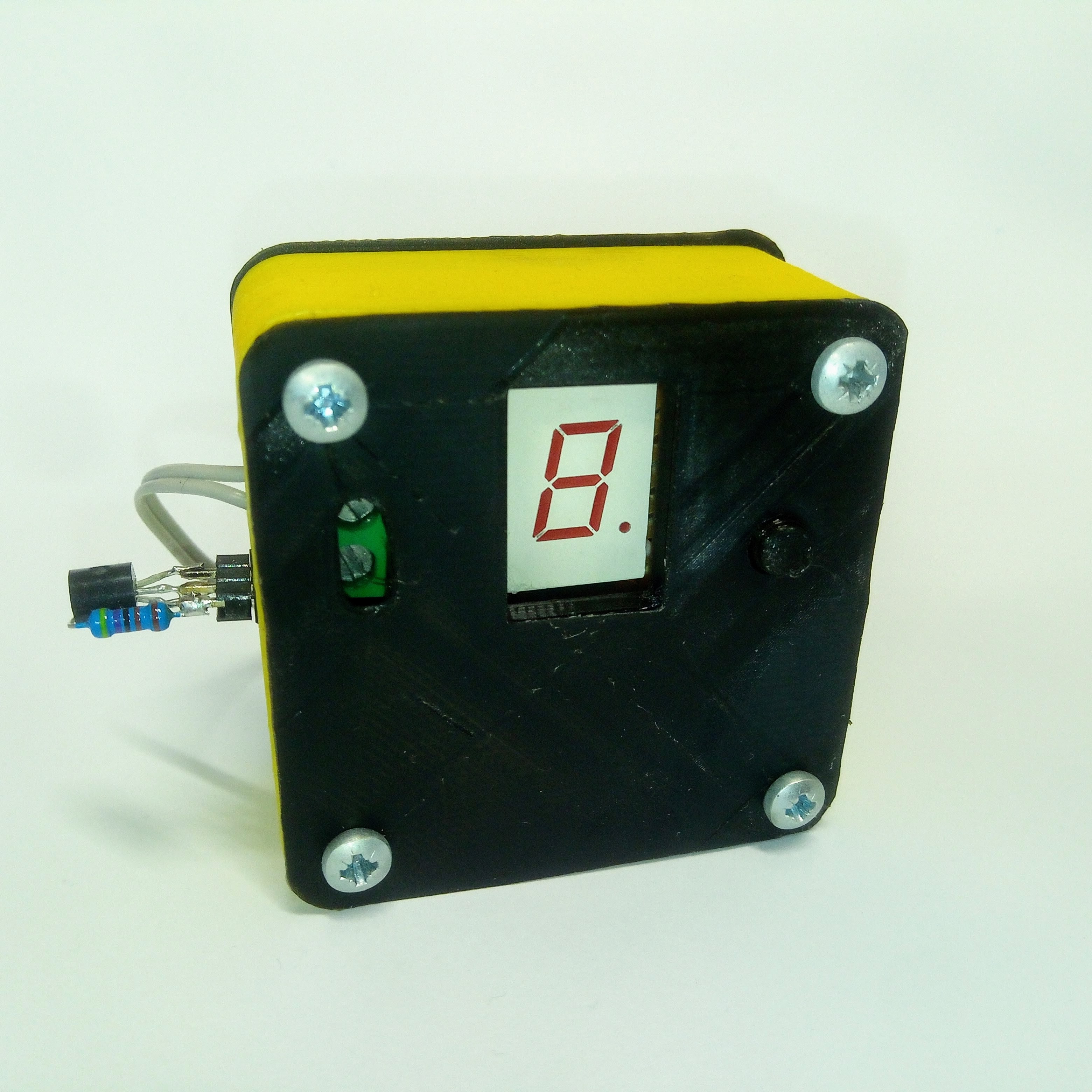
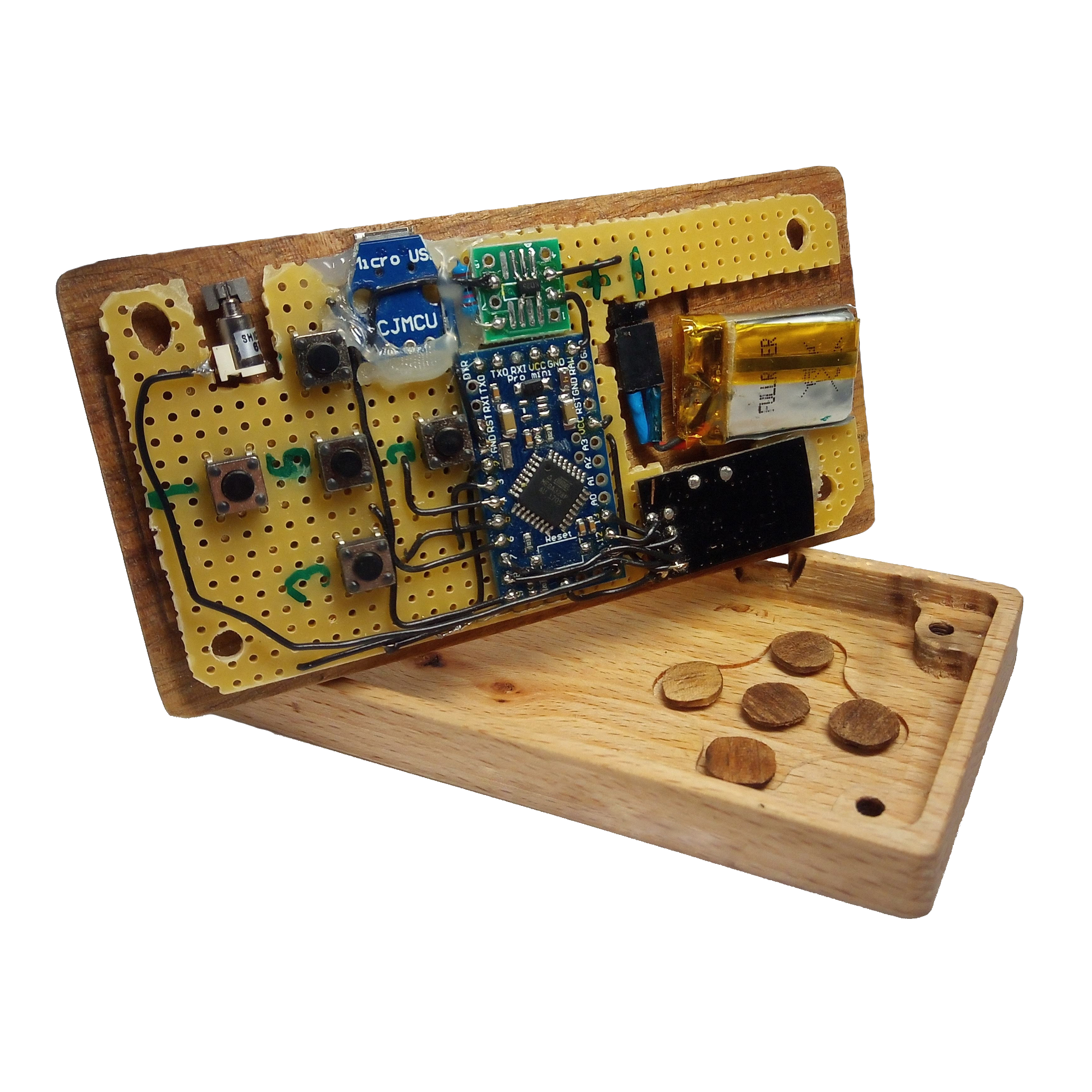
Project ALS Helper
With Tomáš Pavlík we started developing device for pacient with ALS. This device is used to call help when he is in trouble.
3rd year of high school
I am starting to learn computer vision. I creted start gate for RBA, which is used to recognise QR codes on racing cars.
3rd year of high school
I am starting to program more complicated algorithms in C++.
Summer 2019
I bought myself my first 3D printer. I am learning how to desing 3D parts optimalised for 3D printing.
8th year of high school
Thanks to Leaf Award I am developing robot Cing faster then ever. I created 10 copies of it so I can teach kids on summer camps how to program with robot Cing.
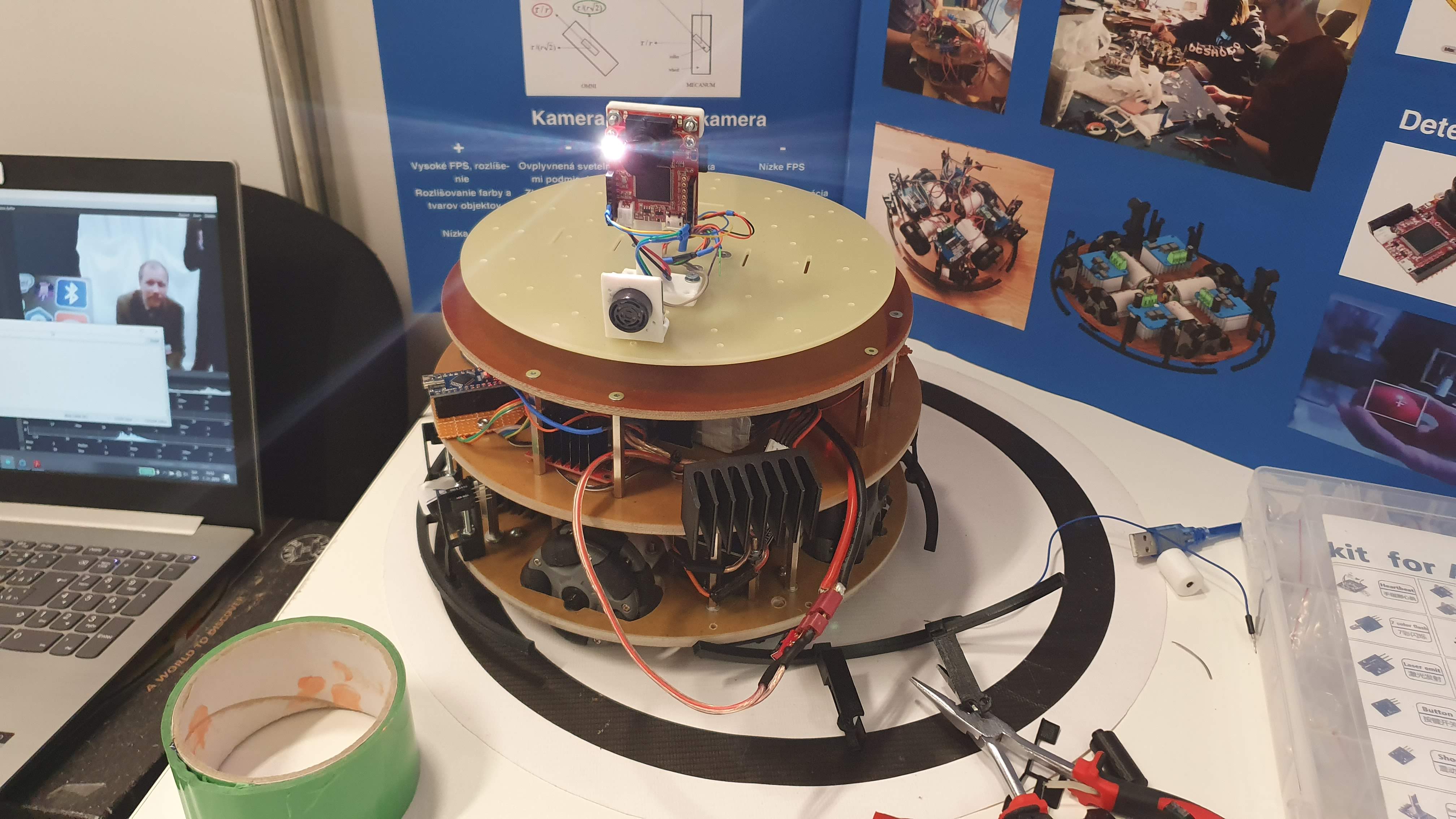
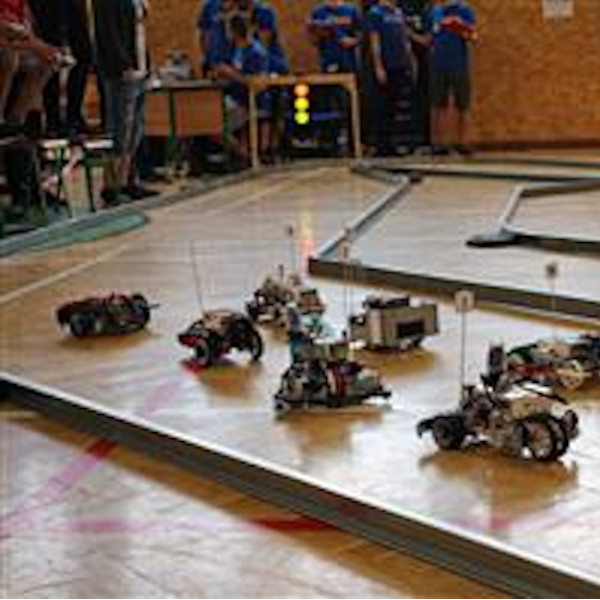
8th year of high school
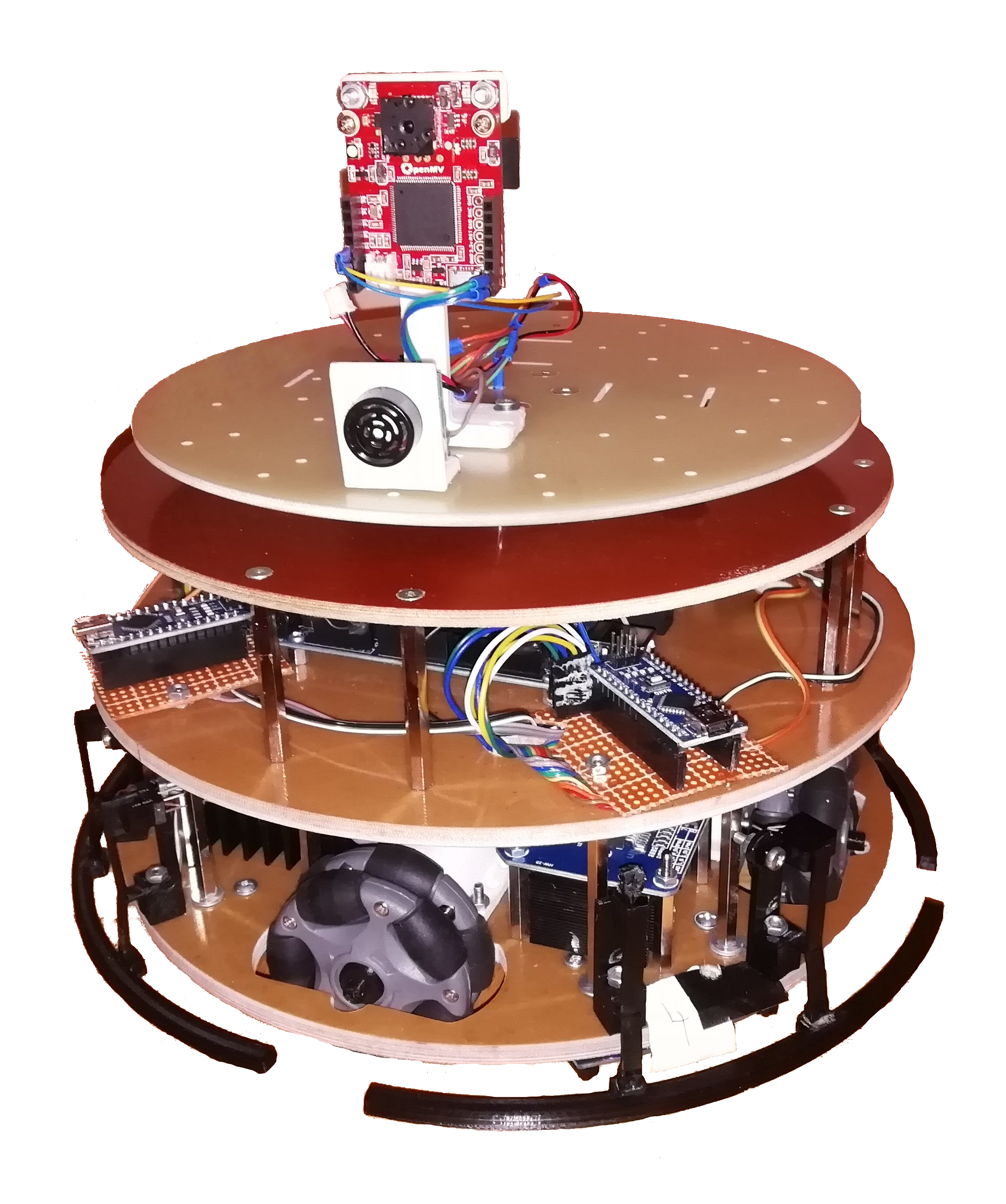
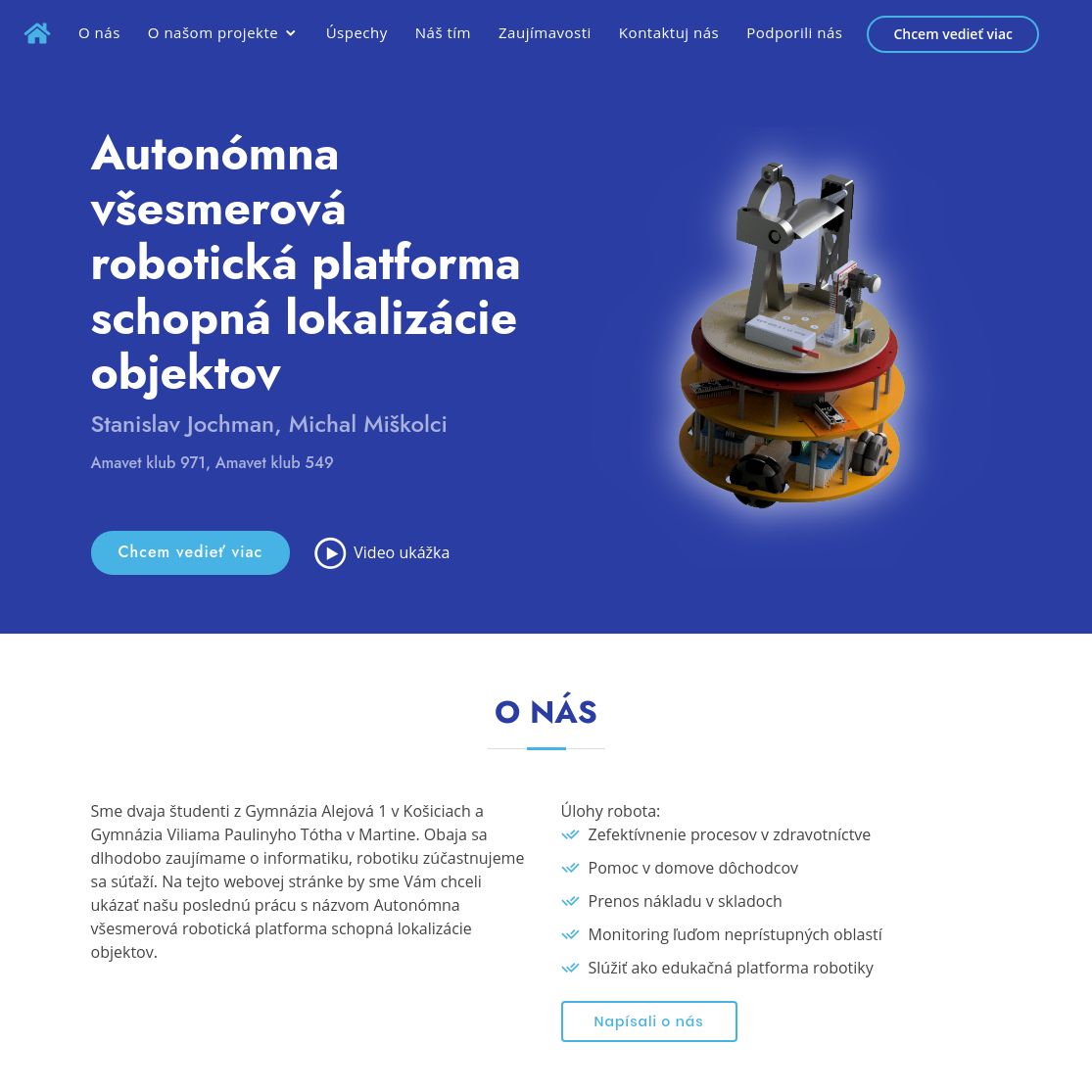
I am experimenting with omnidirectional robots. Wiht my friend Michal Miškolci we have developed omnidirectional platform and programmed it to find and blow out fire in room.