







3.ročník základnej školy
Naučil som sa cínovať a základy elektrotechniky.
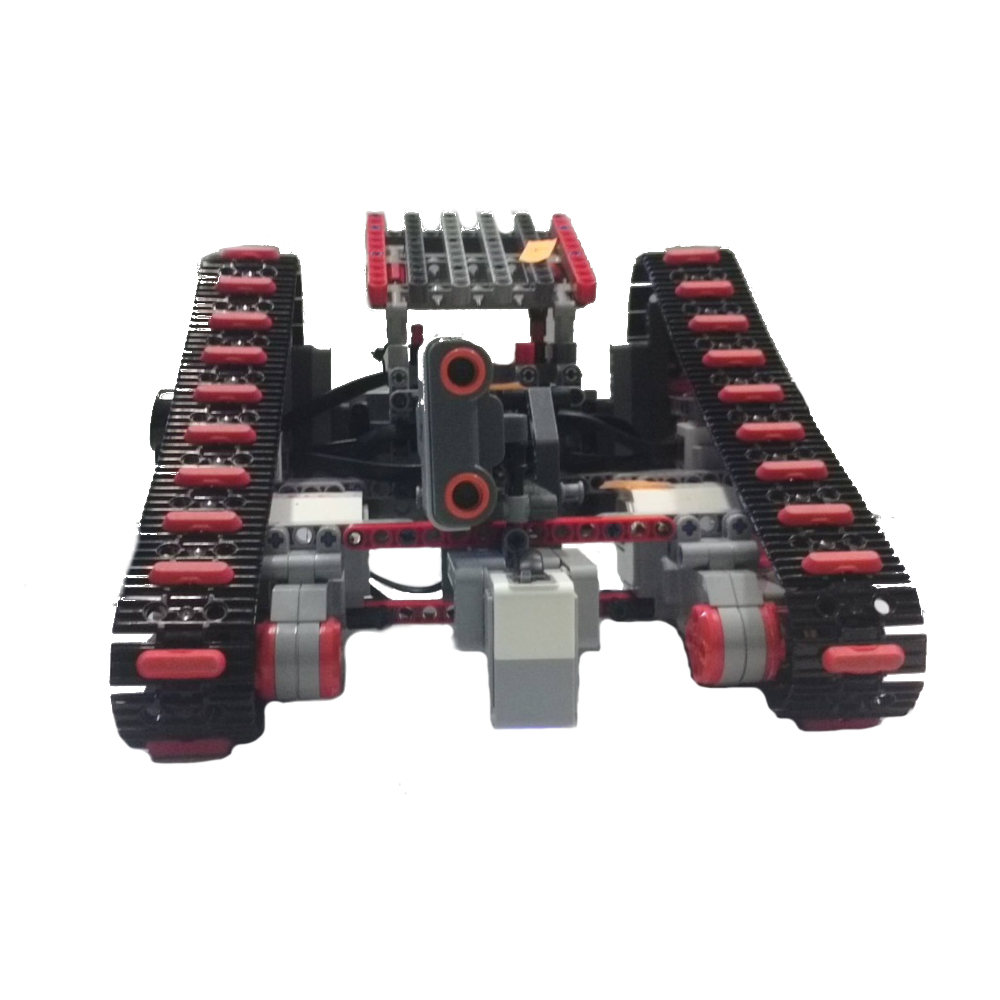
1.ročník Gymnázia
Programujem roboty lego NXT a EV3.
3.ročník Gymnázia
Začínam programovať v Pythone.
3.ročník Gymnázia
Lego nestačí. S Pythonom programujem Raspbery Pi.
4.ročník Gymnázia
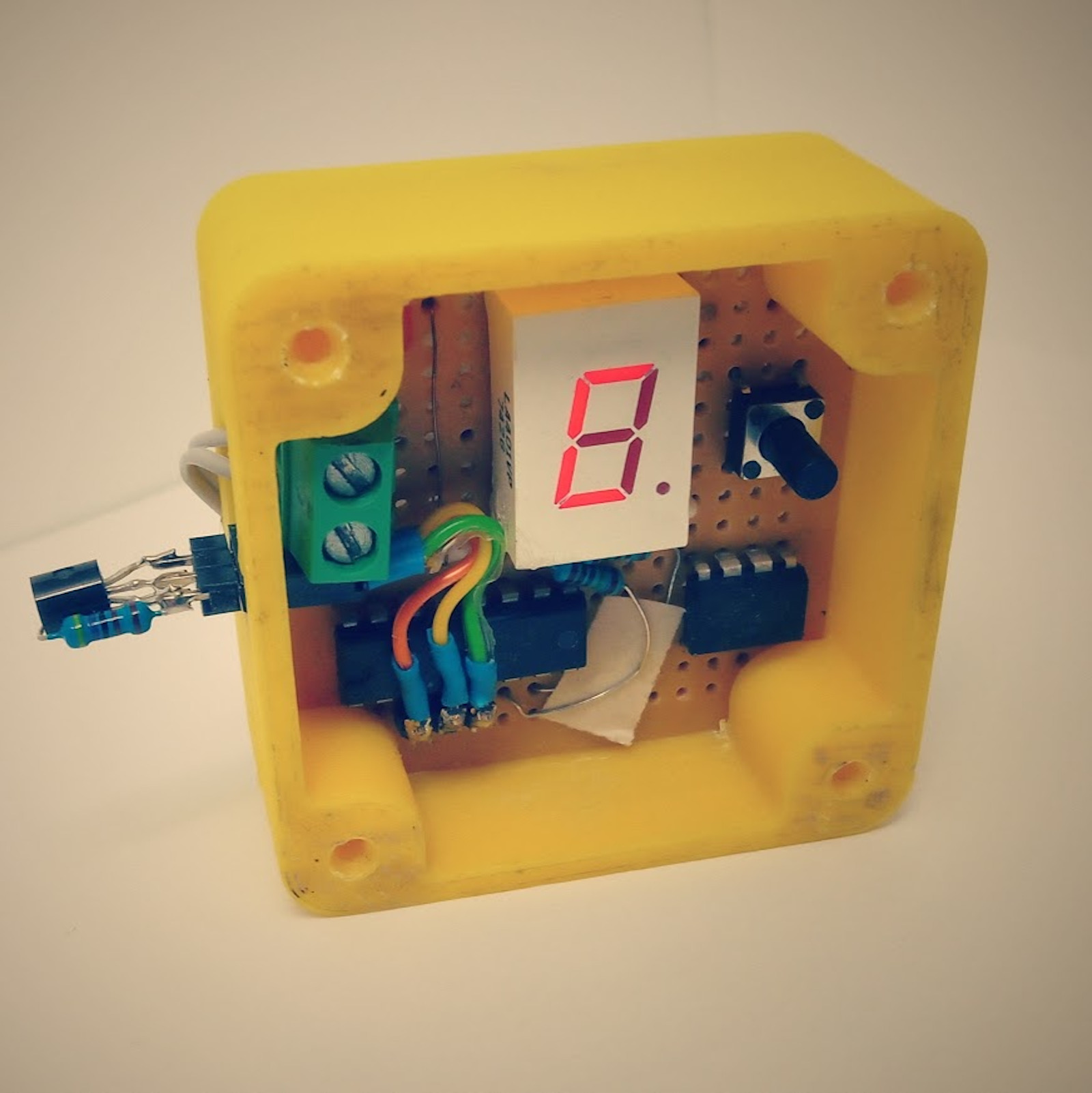
Programovanie Arduina a tvorba prvých robotov a projektov z elektroniky
5.ročník Gymnázia
Účasť na IOT kurze na Žilinskej univerzite, kde som objavil programovanie AVR.
6.ročník Gymnázia
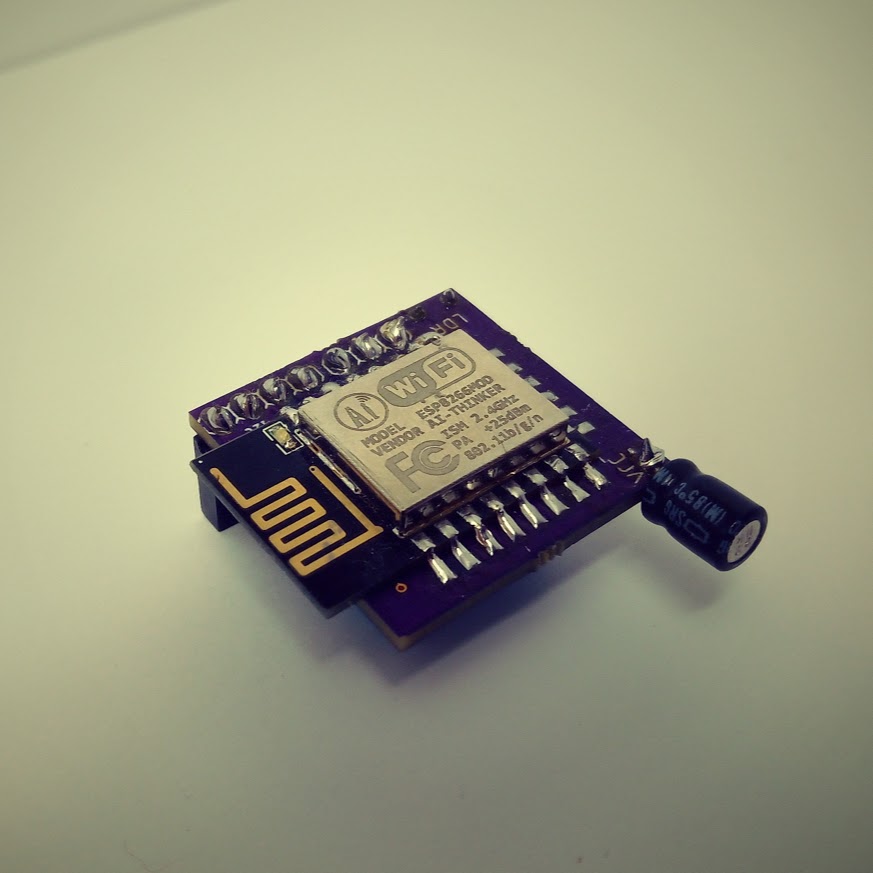
Zlepšil som sa v programovaní AVR, HTML, CSS a začal som programovať IOT zariadenia založené na ESP8266
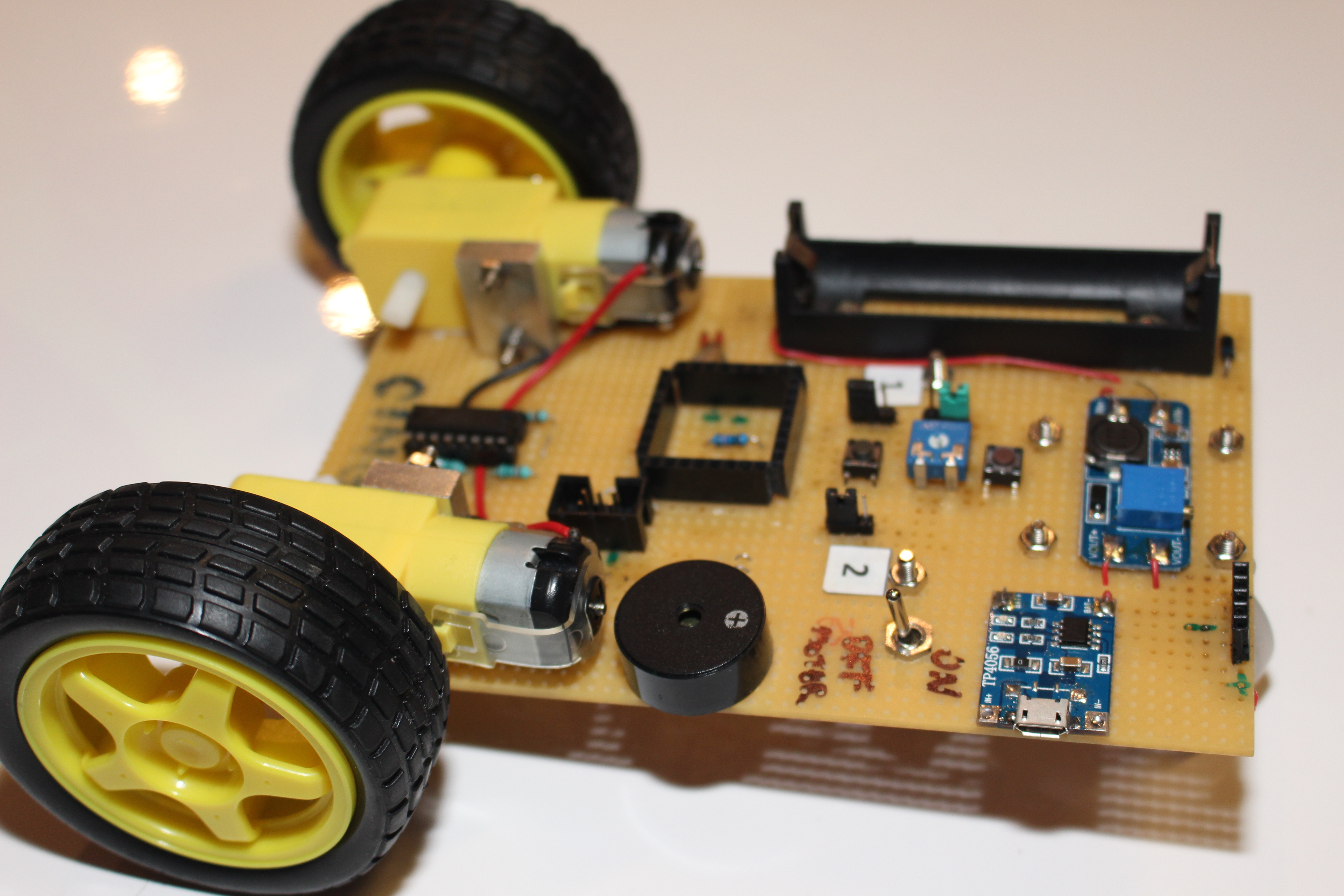
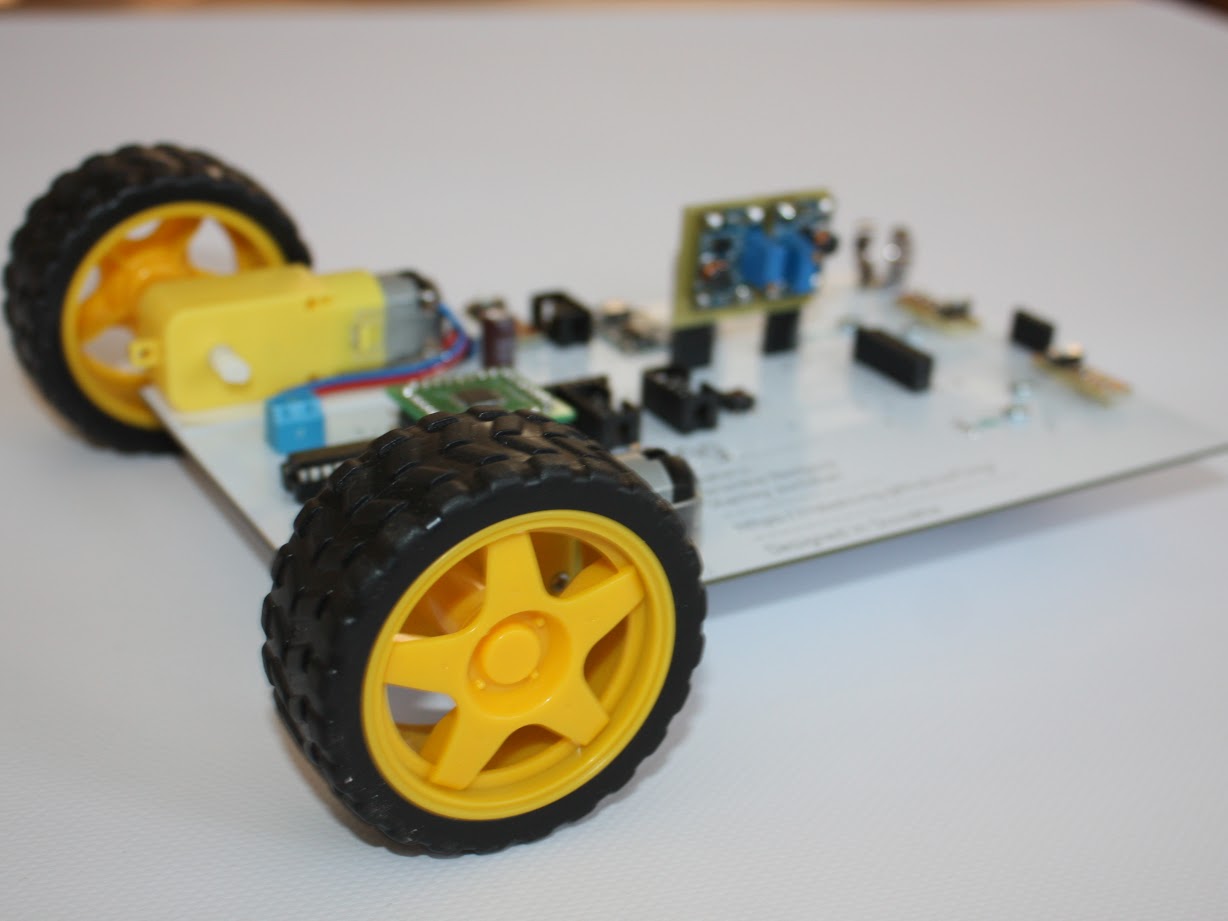
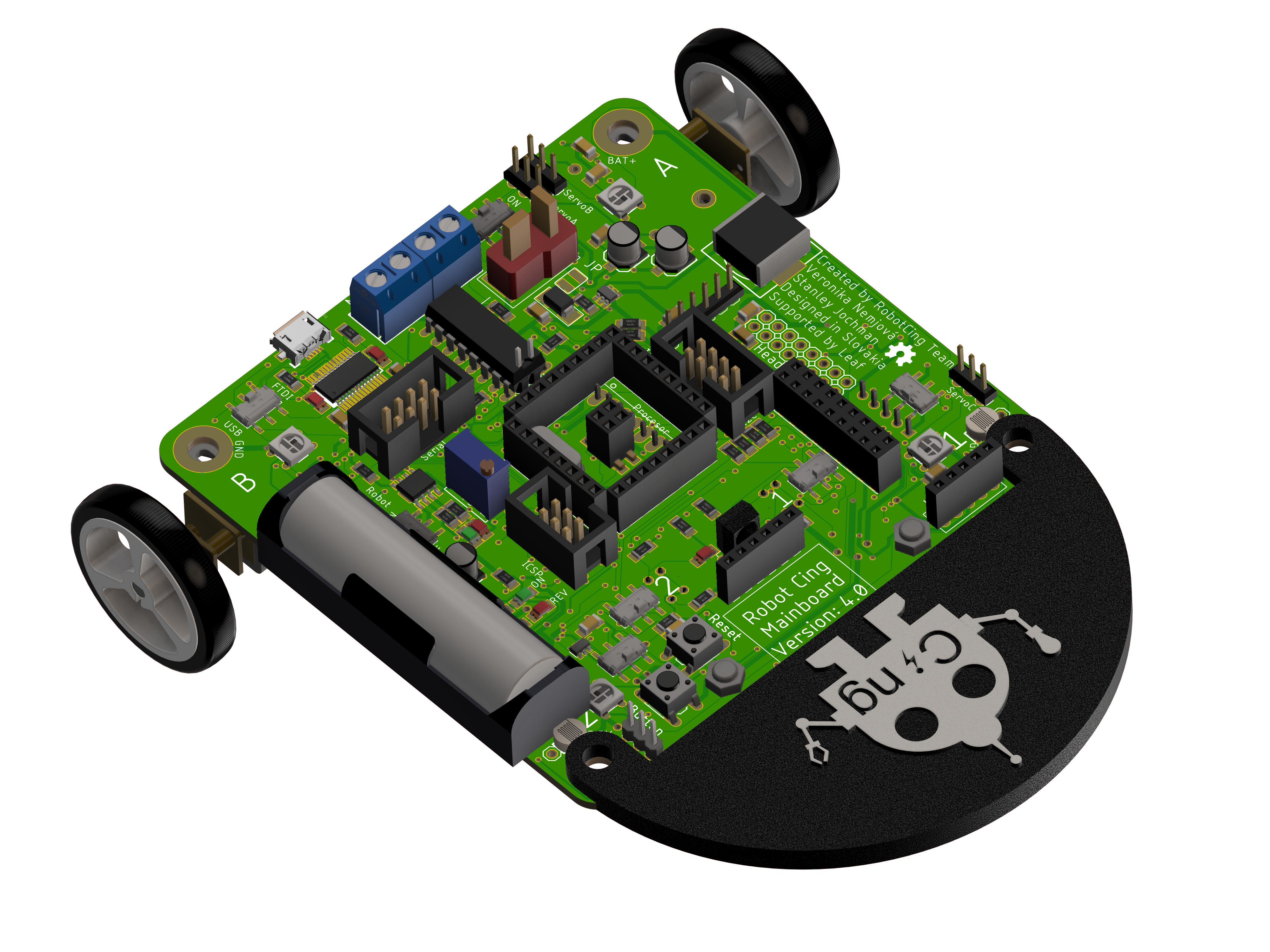
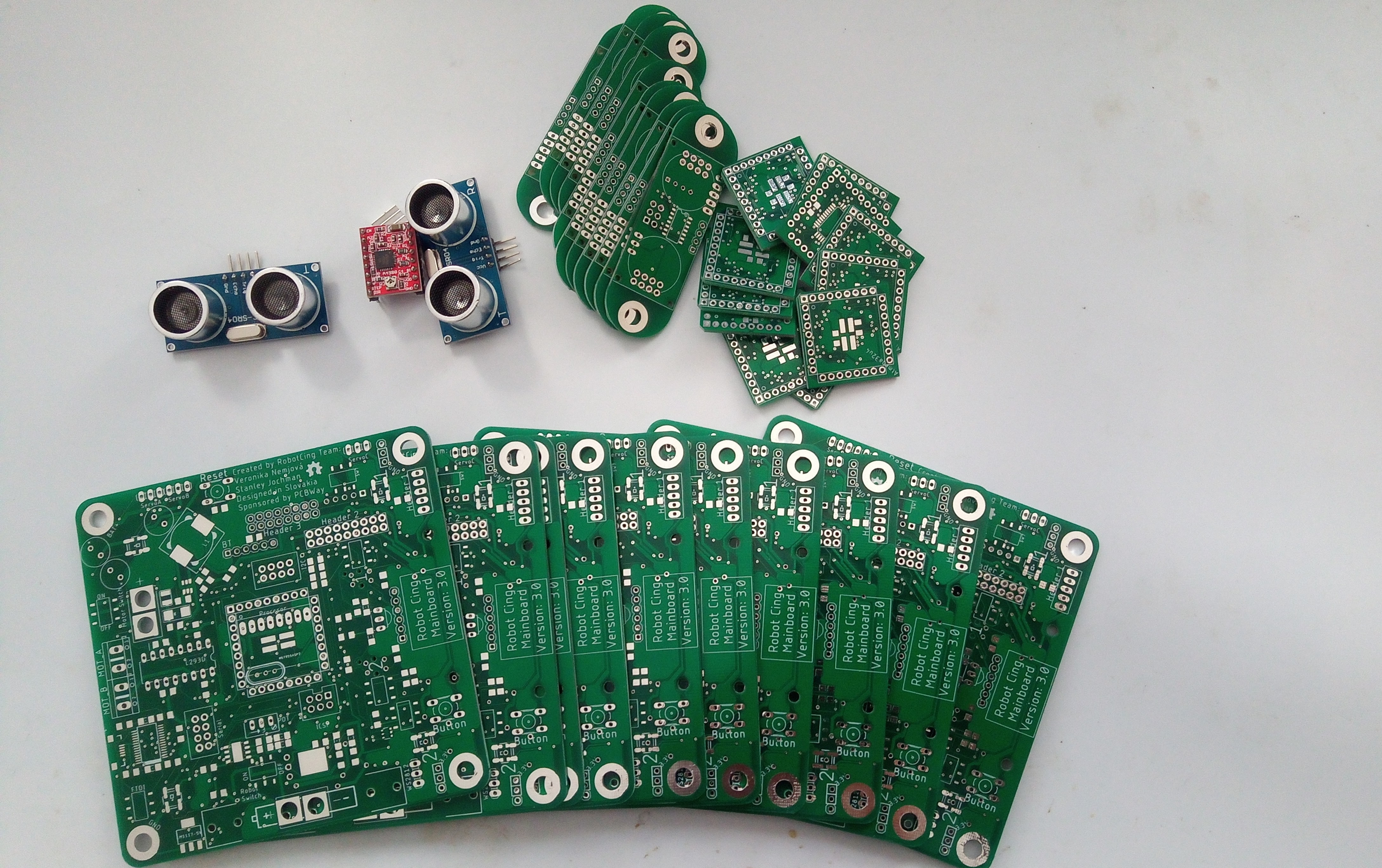
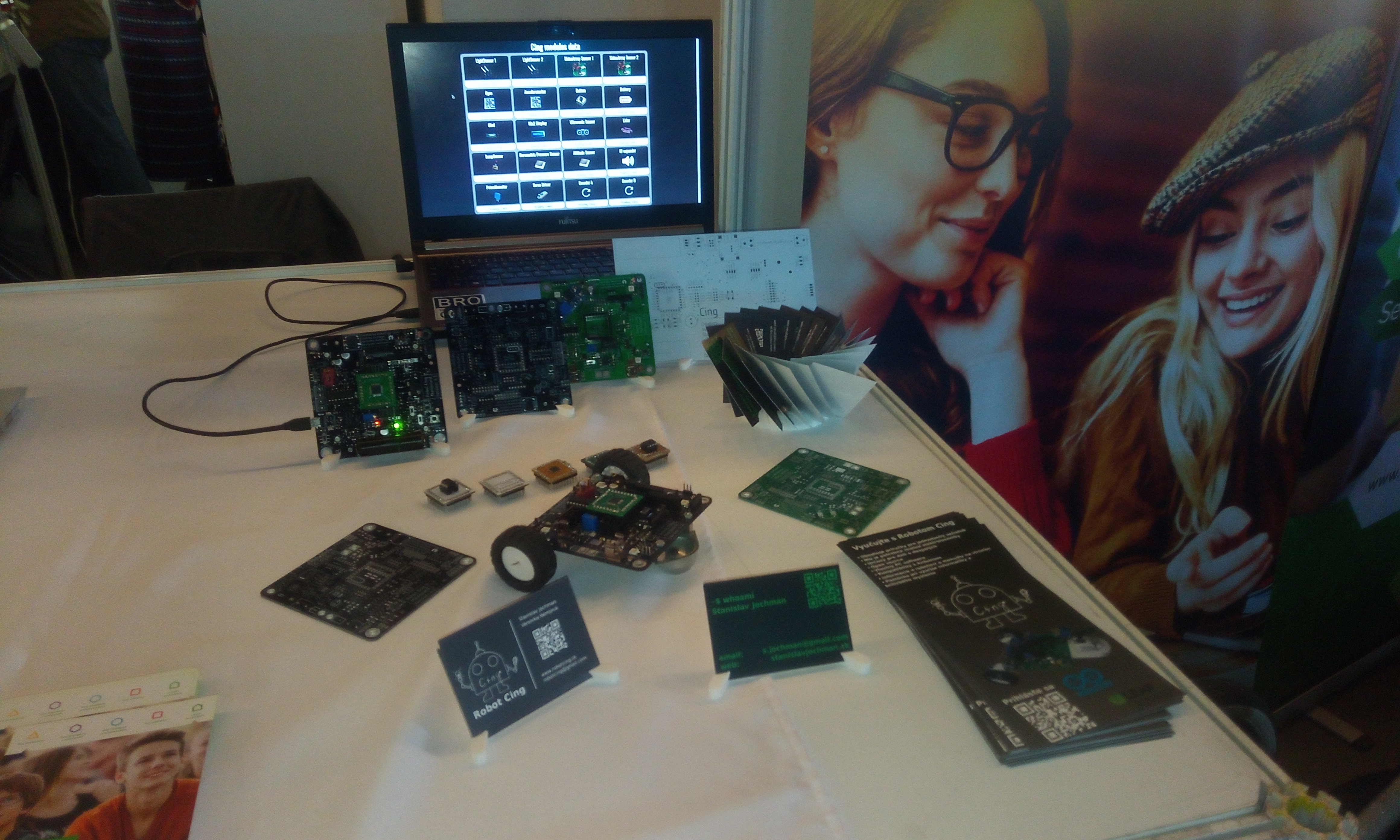
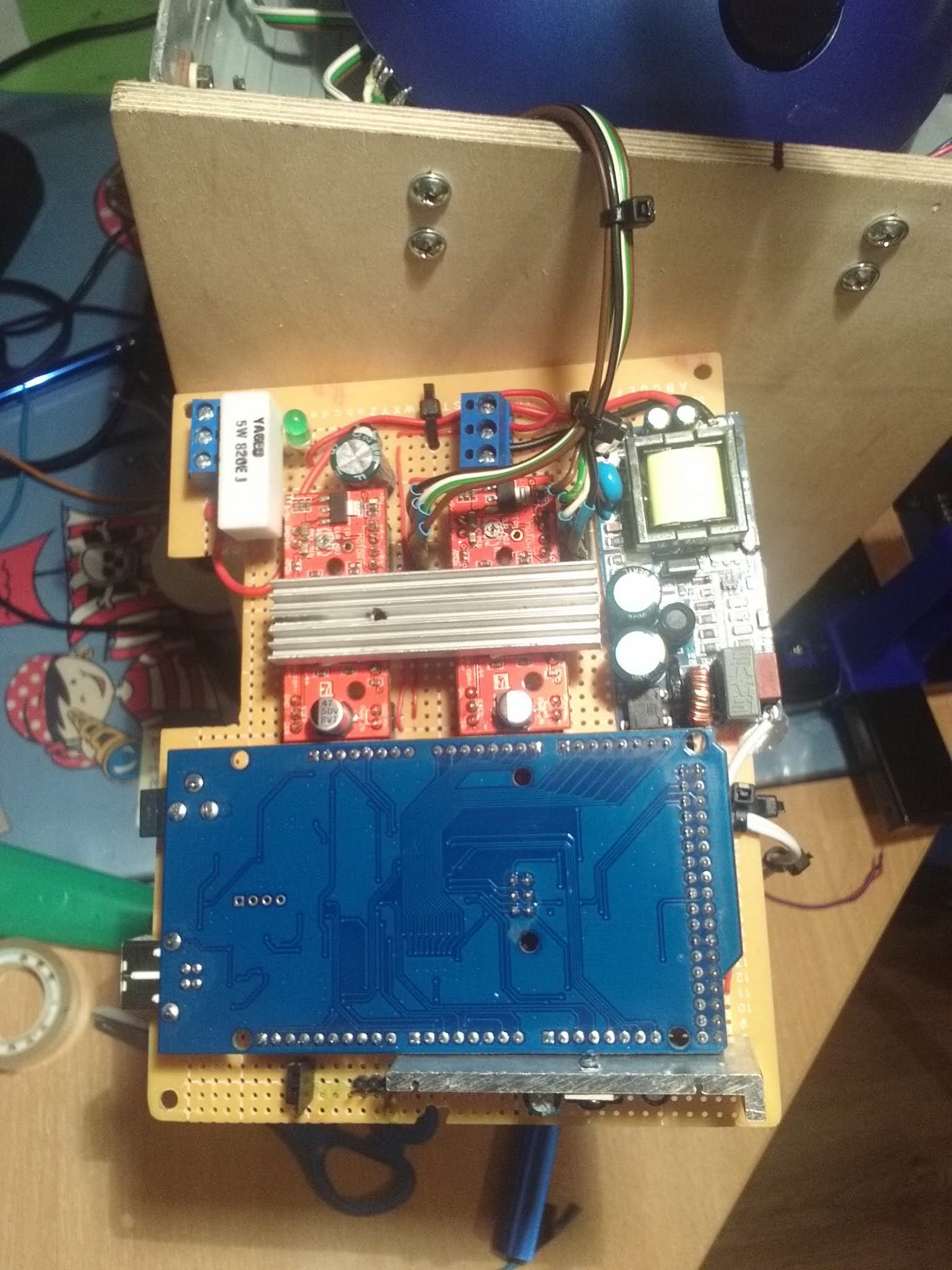
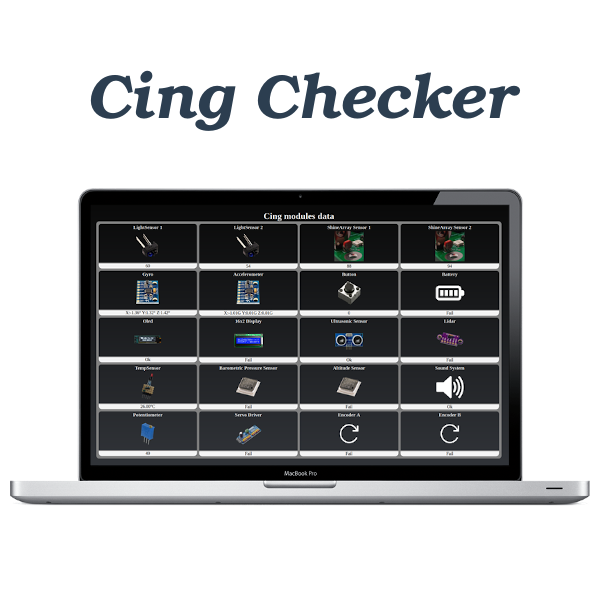
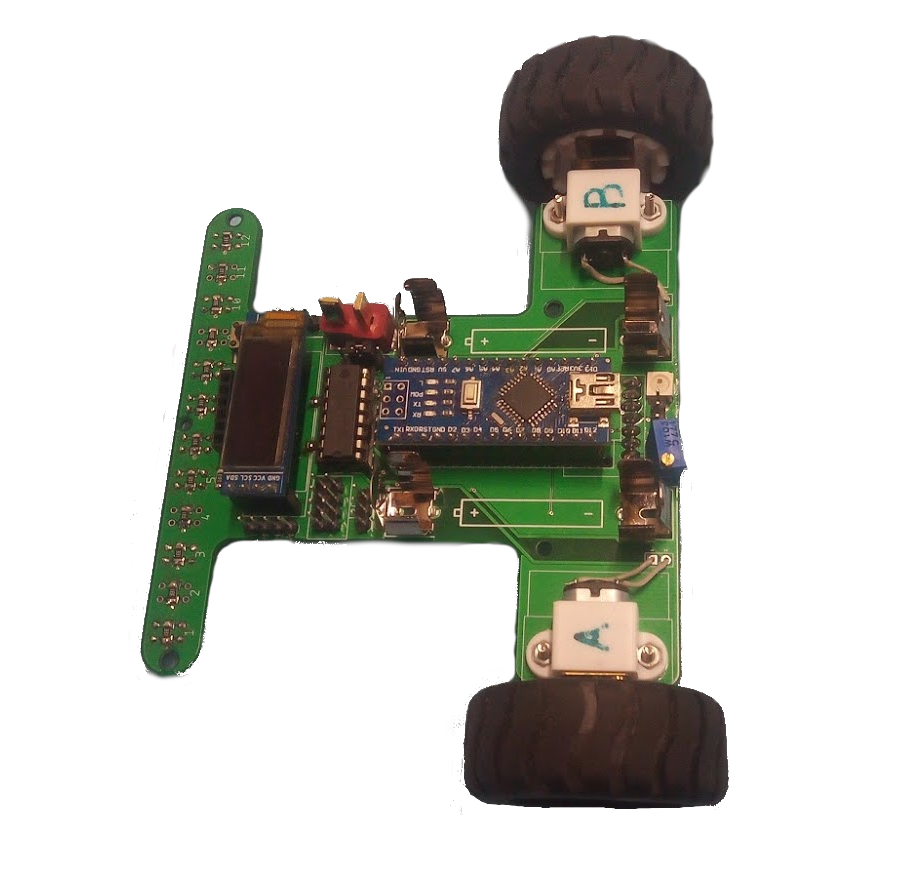
Cing
V spolupráci s Veronikou Nemjovou sme vytvorili robota Cing,ktorý slúži na výučbu elektrotechniky a programovania.
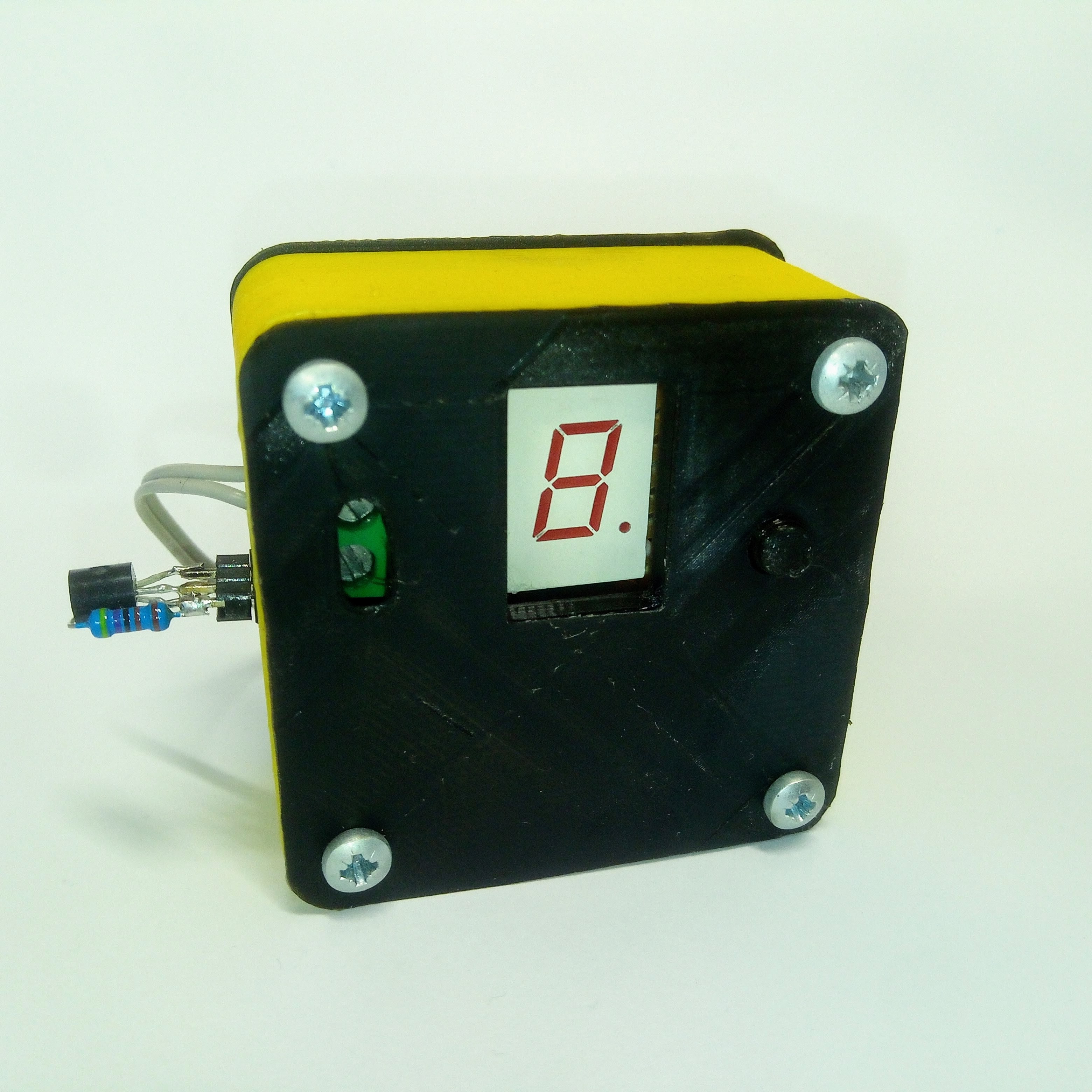
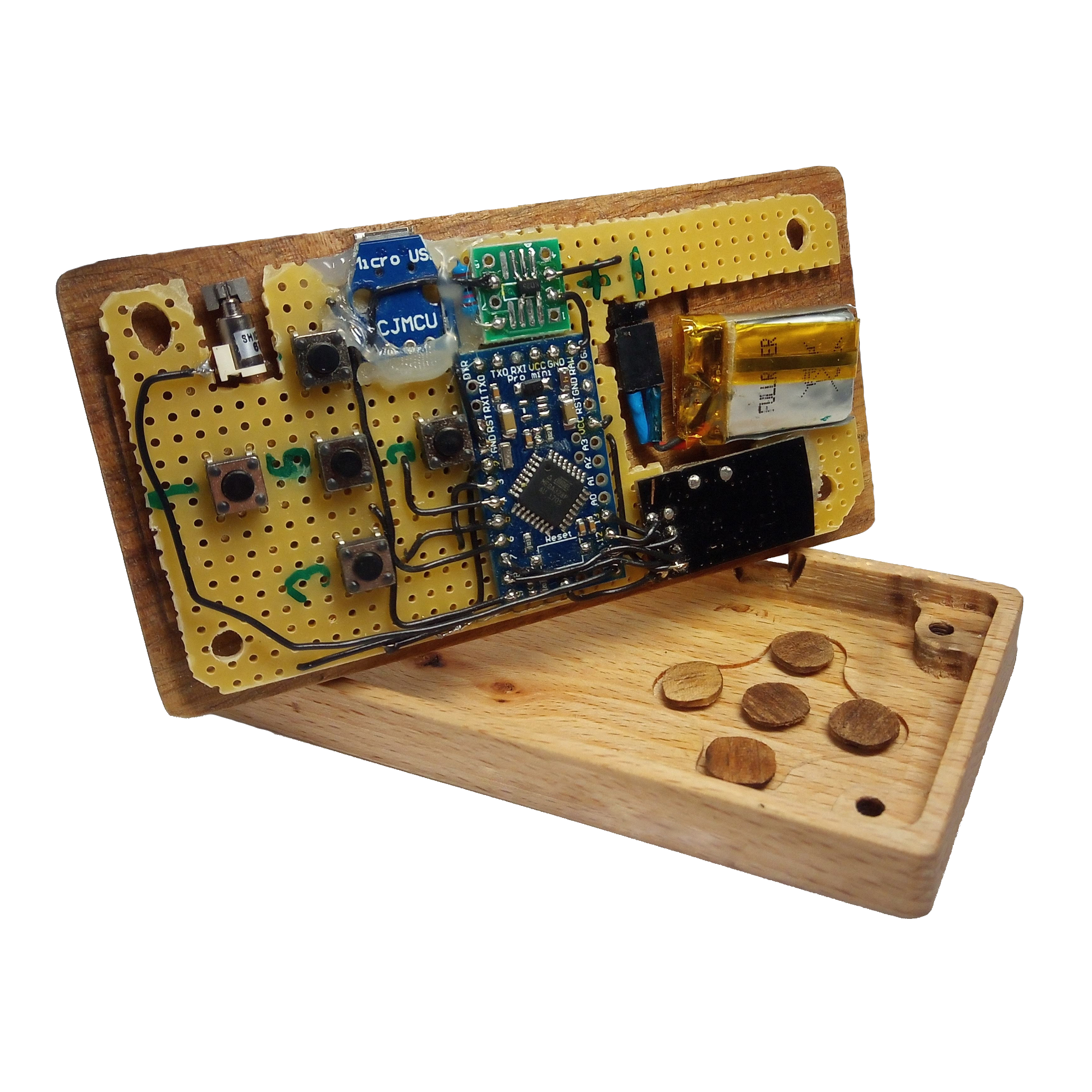
Projekt ALS Helper Amyotrofickú laterálnu sklerózu
Spolu s Tomášom Pavlíkom sme vytvorili zariadenie pre pána s amyotrofickou laterálnou sklerózou, ktoré mu umožňuje zavolať opatrovníka v prípade problémov.
7.ročník Gymnázia
Učím sa computer vision. Vytvoril som semafor pre RBA, ktorý rozpoznáva QR kódy.
7.ročník Gymnázia
Začínam programovať pokročilejšie algoritmy v C++.
Leto 2019
Kúpil som si prvú 3D tlačiareň. Navrhujem 3D diely vhodné na tlač.
8.ročník Gymnázia
Začínam naplno rozbiehať svoj projekt robot Cing s podporou programu Leaf Award.
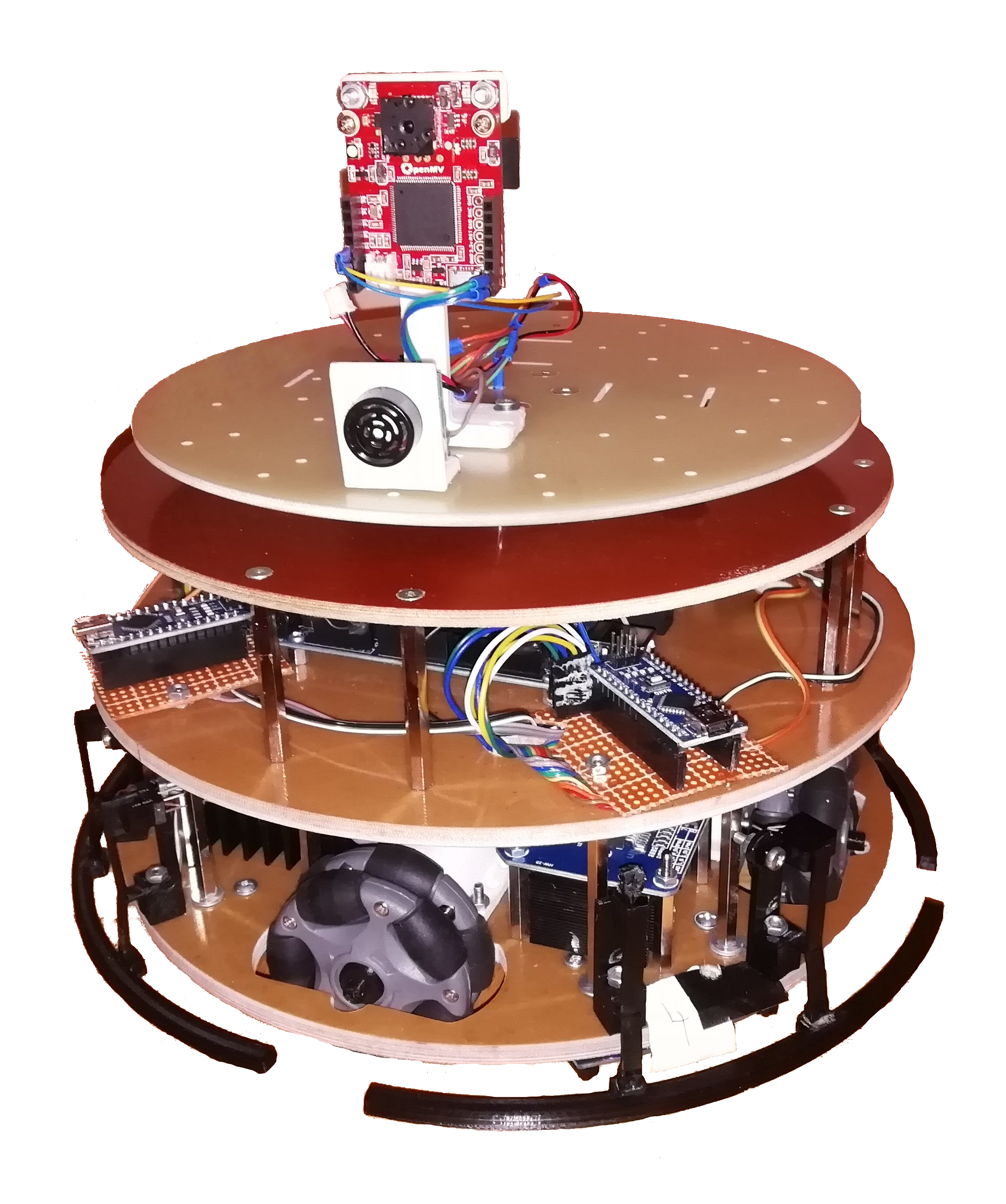
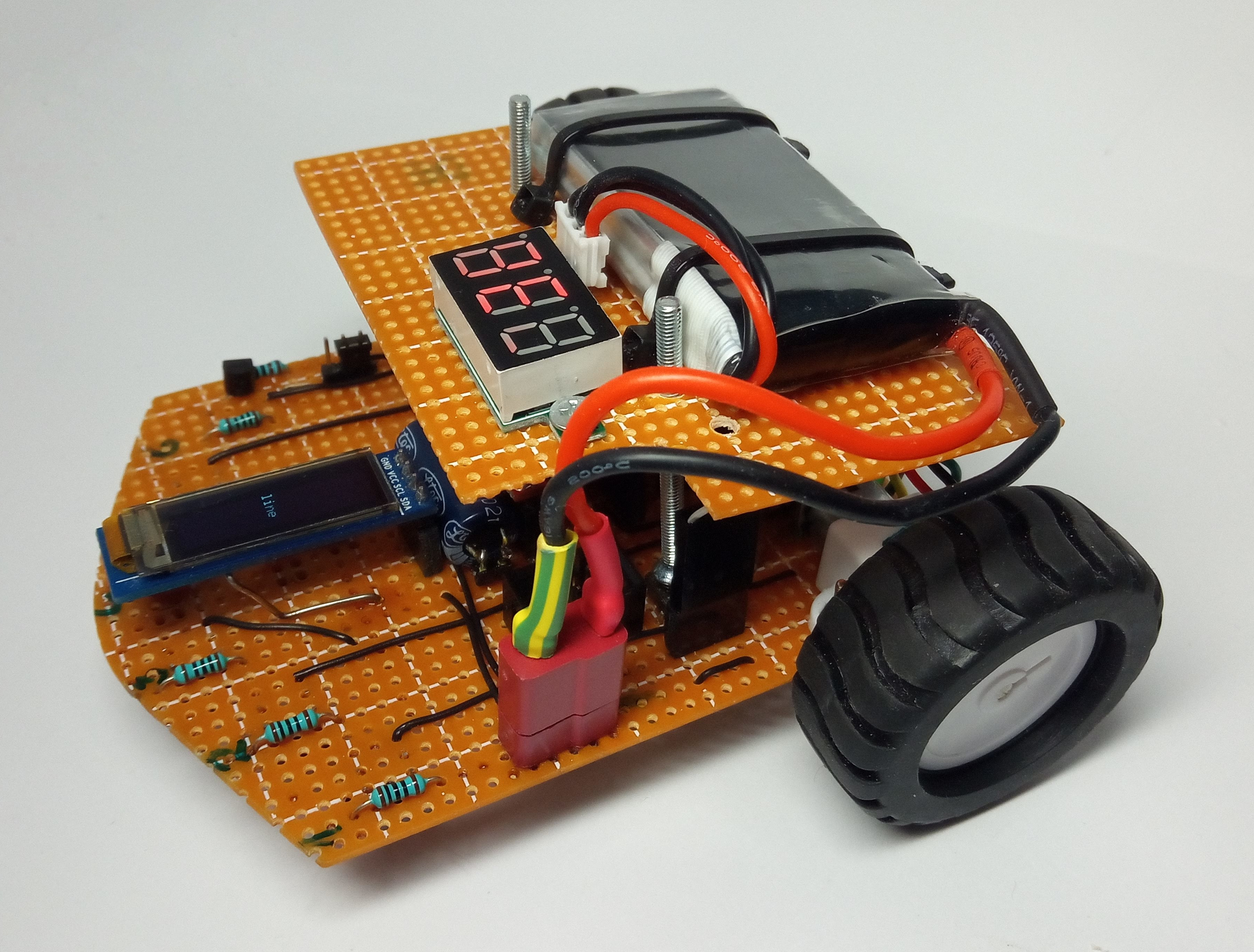
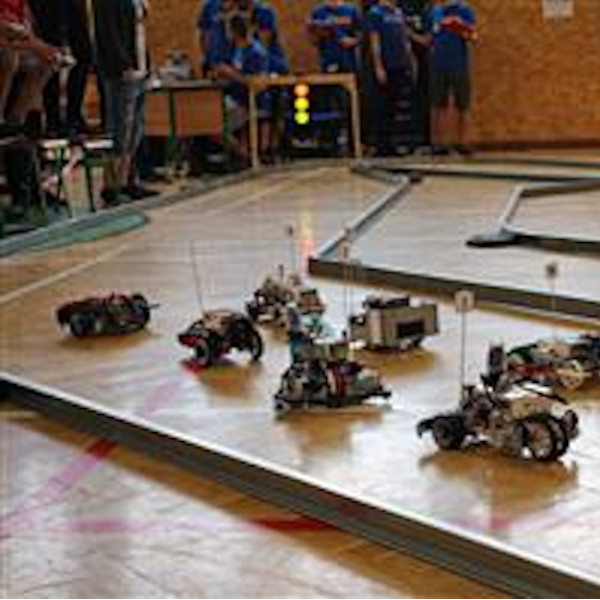
8.ročník Gymnázia
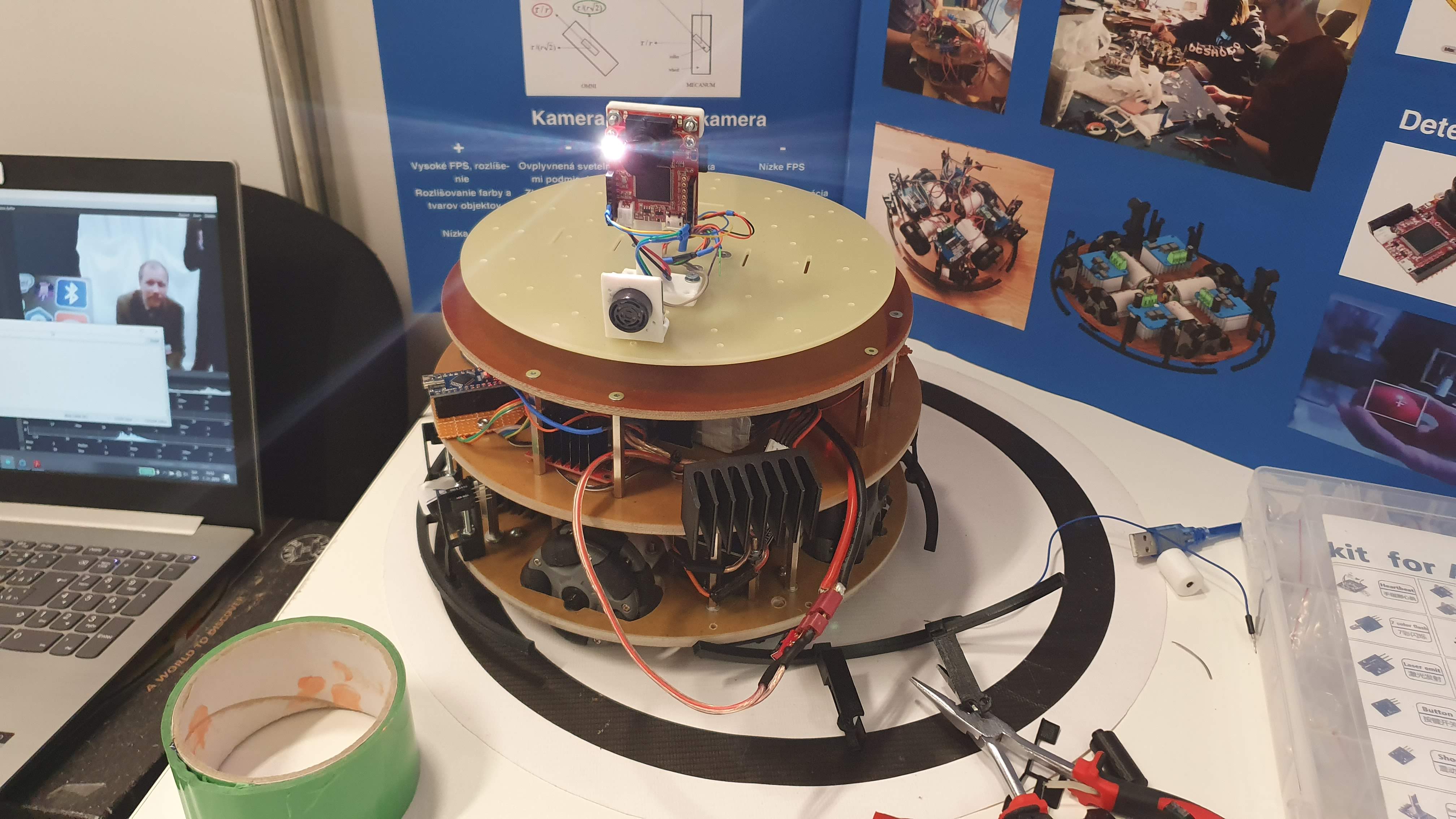
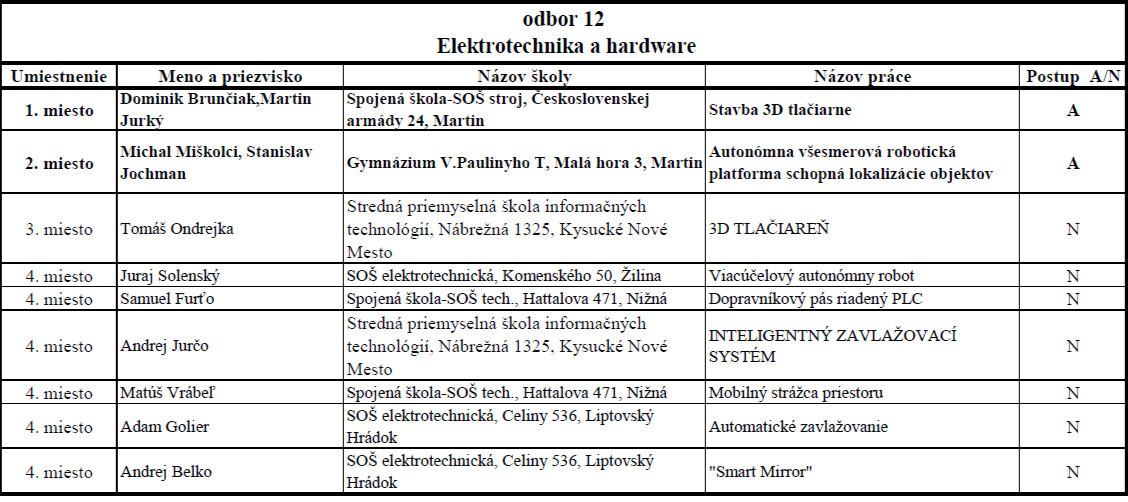
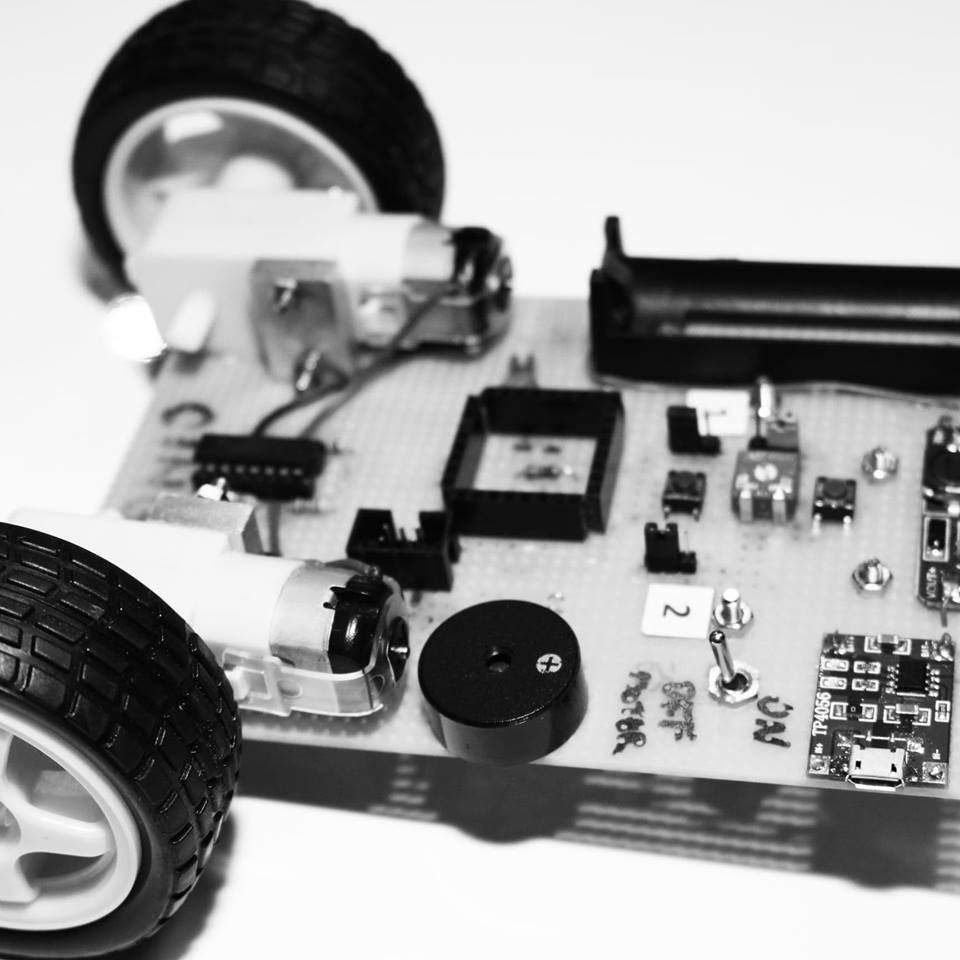
Experimentujem s omni smerovým robotom. Spolu s Michalom Miškocim som vytvoril robotickú platformu, ktorú sme naprogramovali na vyhľadanie a zahasenie ohňa v miestnosti.